2026-07-19
基于Mirauge3D全自动影像三维建模系统的精细三维建模方法
文章出处:刘金兰,金鼎坚,张雄飞.基于Mirauge3D全自动影像三维建模系统的精细三维建模方法[J]. 河北测绘,2021( 2) : 28-38.
- 摘要 -
▼
本文针对传统倾斜摄影实景三维成果存在破洞、扭曲、拉花、精度不高等常见问题,分别从无人机倾斜影像获取手段、点云数据融合两个方面对三维模型质量的提升进行探讨。提出了基于Mirauge3D三维建模软件的流程简单、自动化程度高的精细建模方法:1、针对地物高差落差较大测区,依据测区建筑物高度差有针对性得对无人机航线进行分层规划,导入Mirauge3D中使用精细空三模式进行处理并进行模型建模;2、针对复杂结构且模型精度要求较高的场景,使用单镜头环绕飞行,根据建筑物自身结构的高低调整环绕飞行高度,导入Mirauge3D中进行空三处理与三维模型重建;3、倾斜航空影像与船载影像结合,使用Mirauge3D软件分别对倾斜影像与船载影像进行空三处理,使用Mirauge3D软件生成倾斜影像密集匹配点云,利用匹配点云对船载影像光束法平差结果进行优化,再将其与倾斜影像光束法平差结果在Mirauge3D软件中进行融合,并生成三维模型;4、倾斜航空影像与地面激光雷达数据结合,该方法使用Mirauge3D软件生成倾斜航空摄影密集匹配点云,并将其作为控制,对地面影像光束法区域网平差结果进行重定向,实现空地影像的自动配准,在此基础上进行融合并使用Mirauge3D软件构建TIN、并生成精细实景三维模型。
关键词:倾斜摄影;实景三维;融合建模;精细化三维模型
- 引言 -
▼
伴随着数字孪生城市的快速发展,实景三维建模逐渐成为智慧城市、智慧交通、智慧旅游等领域发展的重要基础,但随着实景三维模型应用领域的不断扩充,对其精度的要求也越来越高。基于无人机倾斜影像的实景三维模型重建技术仍是市面上模型重建的主流手段,但其生产出的三维模型经常因不同程度的变形、遮挡、纹理位置不重合等问题被业内诟病。为了解决这一问题,我们在本文分别从无人机倾斜影像获取手段、点云数据融合两个方面对三维模型效果提升的方法进行探讨。本文主要通过列举使用Mirauge3D软件处理的实际案例与试验,验证特殊无人机航线与空地数据联合对实景三维模型精细化程度提升的可行性与实用性。
- 针对不同地形的特殊无人机航线精细三维建模 -
▼
近几年无人机摄影测量因其自身作业期短、成本低、适用范围广等特点被广泛应用于实景三维领域。利用常见无人机倾斜影像进行三维模型重建在建筑普遍较低的农村、建筑高度较为平均的社区中都有着很好的表现,但对于落差较大的高楼区域、山地区域,坡度过陡的危岩体勘测等领域的应用上还存在较大问题。
-01-
针对高楼区域的无人机分层航线精细三维建模
当前常用的无人机航线飞行在遇到城市高楼区域时,随着建筑物高度越高,建筑物顶端的重叠率也会下降,最终建模精度就越难以保证,导致模型出现空洞、拉花等现象。
本次项目选取广东省某城镇建筑区,测区内包含公路、河流、湖泊、建筑群等常见地物,且建筑高差较大,如图1所示。为了避免出现由于高层建筑重叠率不够而引起的空三点云翘起、模型侧面拉花、建筑物顶端空洞等问题(如图2所示),该项目根据建筑群与整体测区的高程差异,规划出三个不同高程的航线:135m——覆盖除高层建筑外的所有测区;180m——覆盖包含中高层建筑的部分测区;260m——覆盖高层建筑的部分测区。
▼ 图1 ▼
测区密集建筑群概况(由Mirauge3D处理所得空三成果可直观体现地物高度关系)

▼ 图2 ▼
常规航飞空三与建模成果,(a)为空三成果,(b)为建模成果部分截图

本次项目共采集无人机倾斜影像84940张,将分层航飞后的无人机影像依据层高、架次整理分类,一次导入Mirauge3D软件中,使用NormalAT模式进行空三处理,空三结果如图3所示,空三点云丢片较少没有翘起与卷曲现象,且精度GSD可达0.019m。随后使用Mirauge3D软件进行控制点编辑并进行三维模型重建,生成的精细实景三维模型如图4所示,测区低、中、高层建筑模型均保持了平整的建筑面、建筑顶端也无拉花孔洞,证实了分层航飞能很好得适用于测区建筑落差较大的场景重建应用中。
▼ 图3▼
基于Mirauge3D软件的空三点云成果部分截图

▼ 图4 ▼
基于Mirauge3D软件的三维模型成果部分截图,(a)为低层建筑三维模型成果,(b)为中层建筑三维模型成果,(c)为高层建筑三维模型成果

-02-
针对异形建筑的单镜头环绕飞行精细三维建模
本次项目选取了浙江省某度假区的城堡酒店,该建筑占地面积超过26,000平方米,该建筑包含大量拱门,廊桥等复杂结构,建筑凹槽较多,所以常规无人机航线飞行难以满足精细化建模的进度要求。采用单镜头环绕飞行不仅可以减少倾斜摄影采集的影像数量,同时拍摄角度也更加丰富。
▼ 图5▼
基于Mirauge3D软件的空三点云成果部分截图

▼ 图6▼
基于Mirauge3D软件的三维模型成果部分截图


本次项目共采集影像367张,将环绕飞行的无人机影像数据直接导入Mirauge3D软件中,使用FastAT模式进行空三处理,空三结果如图5所示。整体空三点云没有丢片且很好的复现了建筑物与周围山体,且精度GSD为0.052m。在使用Mirauge3D软件进行三维模型重建,生成的精细实景三维模型如图6所示,这很好得证实了单镜头环绕飞行在较少了倾斜影像采集数量的同时也有效提高了三维模型侧边的精细化程度,可以将环绕飞行广泛得应用于建筑结构复杂、细节精度要求高的模型重建场景中。
- 空地数据联合精细三维建模 -
▼
-01-
倾斜航空影像与船载影像结合三维建模
在传统实景三维模型的生产过程中,人工进行控制点编辑是提高三维模型精度的必备步骤,但针对大范围场景的三维模型重建,控制点编辑往往需要大量人力,对此我们提出了一种倾斜航空影像与地面数据联合的三维建模方法,减少人工干预的过程,保持原有精度完成实景三维模型的重建。
该项目采用了重庆市某河道倾斜航空影像与船载影像进行空地联合实景三维建模实验,其中,特征点提取和光束法平差流程使用了中测智绘Mirauge3D软件;船载影像光束法平差优化采用了船载影像区域网重定向方法;多源平差结果融合、融合结果的三维模型重建均采用了中测智绘的Mirauge3D软件。
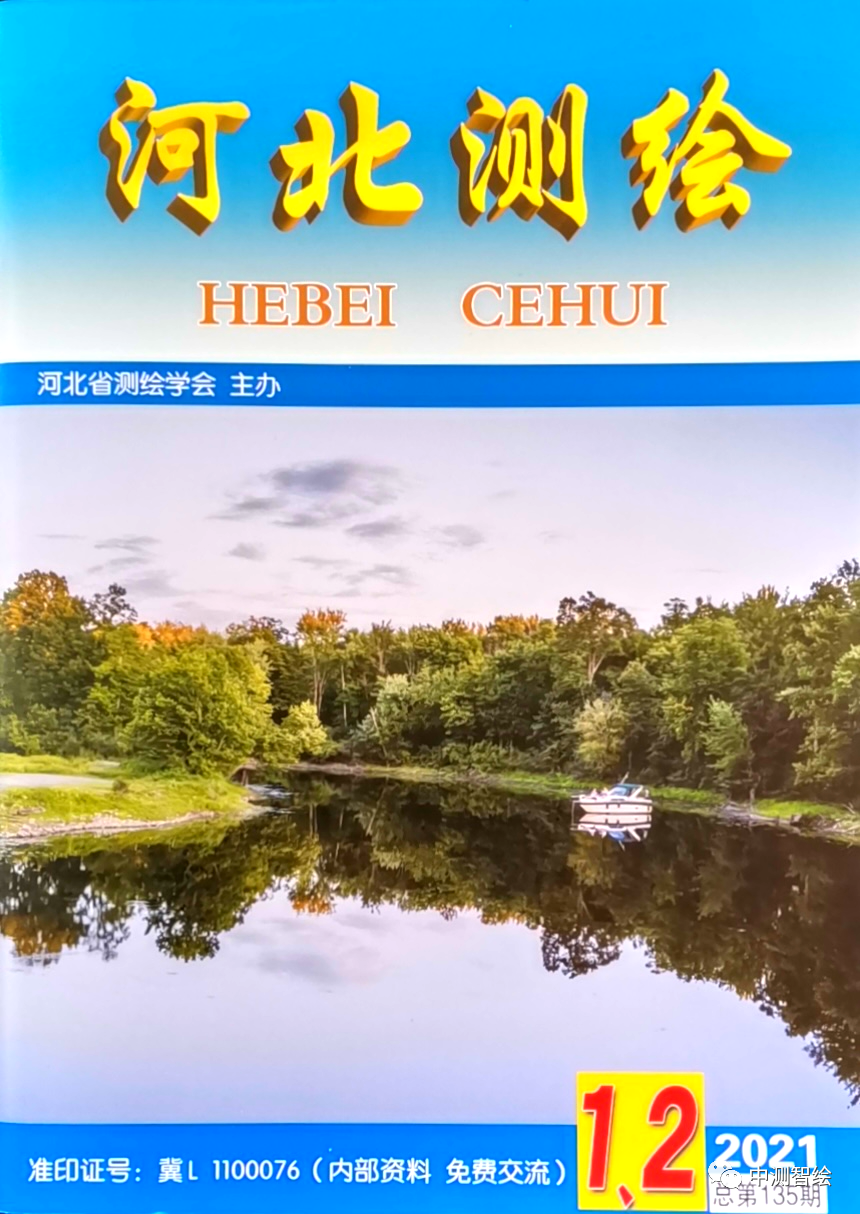
首先使用Mirauge3D软件对船载影像单独进行特征点提取和光束法平差得到的船载影像稀疏点云如图7,共有影像匹配点883个。由于船载影像GNSS数据精度有限,船载影像光束法平差结果精度也较低,与倾斜影像空三结果存在一定的位置偏移,难以直接和倾斜影像空三结果进行融合。
▼ 图7 ▼
船载影像稀疏点云
使用Mirauge3D软件对倾斜航空影像进行单独空三并进行三维模型重建,生成的倾斜影像密集匹配点云如图8。在生成密集匹配点云时,只需要生产能覆盖船载影像稀疏点云的空间范围即可。图 8所示的倾斜影像密集匹配点云的点云密度为 139 pts/m2,远超过了一般的激光雷达点云密度。
▼ 图8 ▼
倾斜影像密集匹配点云
利用倾斜影像密集匹配点云对船载影像光束法平差结果进行优化,得到与倾斜影像光束法平差结果在空间上配准的船载影像平差结果,将优化后的船载影像平差结果与倾斜影像光束法平差结果在Mirauge3D软件中进行融合,生成一个整体的光束法平差结果,然后在此结果的基础进行三维模型重建,得到的空地联合三维模型如图9。
▼ 图9▼
倾斜航空影像与船载影像联合建模结果

▼ 图10 ▼
不同方法联合建模全局效果对比,(a)人工选择控制点方法,(b)空地数据联合方法
▼ 图11▼
不同方法联合建模局部放大效果对比(a)人工选择控制点方法,(b)空地数据联合方法
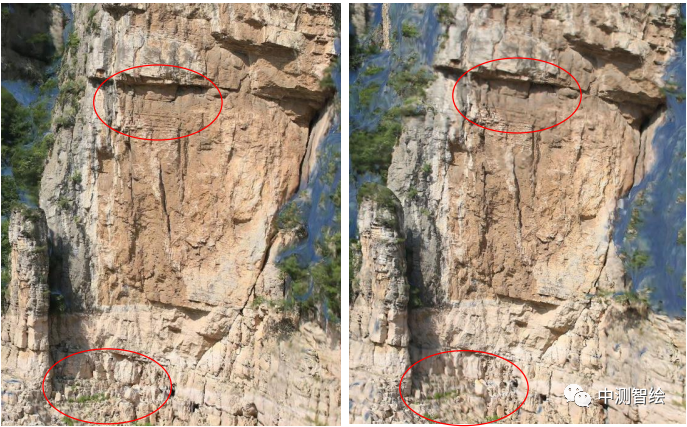
建模效果对比如图10、图11所示,倾斜航空影像和船载影像的自动化空地联合建模与现有的人工选择控制点联合建模方法相比,减少了人工工作量,实现了自动化。不仅如此,倾斜航空影像和船载影像空地联合建模即具有倾斜航空影像三维模型宏观的视野,又具有船载影像三维模型精细刻画能力,倾斜航空影像和地面影像的联合三维建模技术可以更加广泛的应用于大范围城区建筑物精细建模地质分析、滑坡灾害研究等领域(Wu 等, 2018; 韩友美等, 2020;Bolognesi 等, 2014; Gao 等, 2018)。
-02-
无人机倾斜影像结合地面激光雷达数据精细三维建模
为了提高倾斜摄影技术在城市三维建模效果,本项目结合无人机倾斜摄影的高效性与地面激光扫描的精确性,采用了地面激光扫描技术在倾斜摄影建模基础上进行匹配融合的方法,通过对建筑物进行无人机倾斜摄影和地面摆站激光扫描相结合的数据处理,互相弥补不足,将其用于城市高层建筑的三维建模中。
地面三维激光点云的高精度可以弥补倾斜摄影近地面区域精度偏低的缺陷,而空中无人机倾斜摄影则弥补了三维激光顶部扫描盲区和影像获取视角不够广的缺陷,将两种方法的点云进行融合,再利用Mirauge3D进行三维建模,就可以实现三维模型整体上的高精度,解决倾斜摄影三维建模局部拉花、底部效应等问题。同时三维激光扫描可以获取地面特征点的三维坐标,可以免除倾斜摄影测量外业布设像控点的工作,大大提高作业效率,降低劳动强度。
三维激光扫描与倾斜摄影技术的结合,实现了空中无人机航空影像与地面三维激光点云的“空地联合”,全方位无死角获取地表物体的完整表面坐标信息,实现高精度的三维建模,主要的作业流程如图12所示。
▼ 图12▼
倾斜摄影及激光扫描技术融合的三维重建作业流程
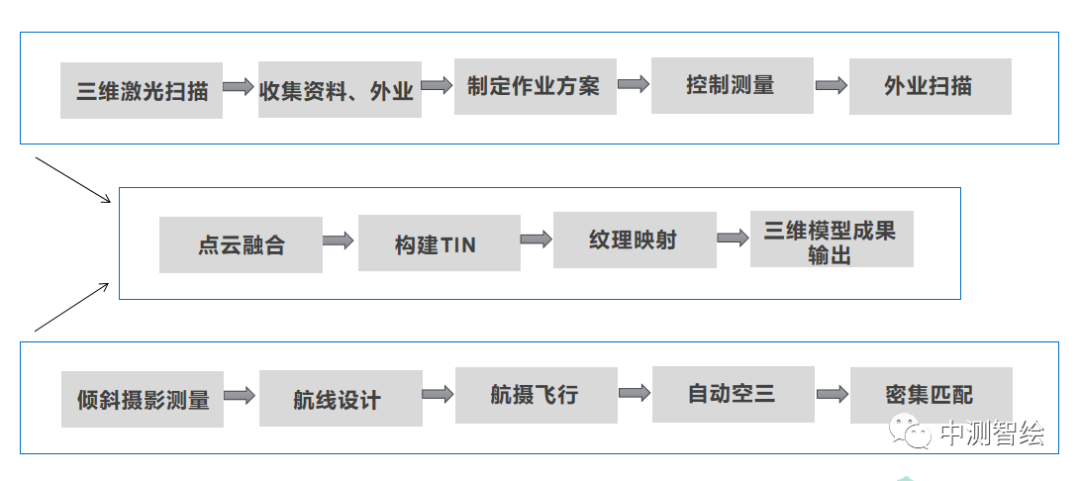
使用Mirauge3D软件对无人机倾斜影像进行空三解算,生成 倾斜摄影密集点云,并将点云转换为点云通用格式*.Las。这些点云要与三维激光扫描仪扫描获取的激光点云进行数据融合。以三维激光点云为基准,使用迭代最邻近点配准法,也即ICP 算法和人工配准相结合的方法,将倾斜摄影密集点云与三维激光点云进行配准,从而得到高精度的融合点云,并使用Mirauge3D软件构建TIN、并生成精细实景三维模型。
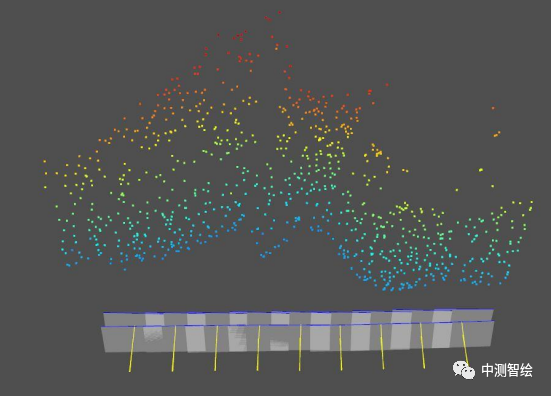
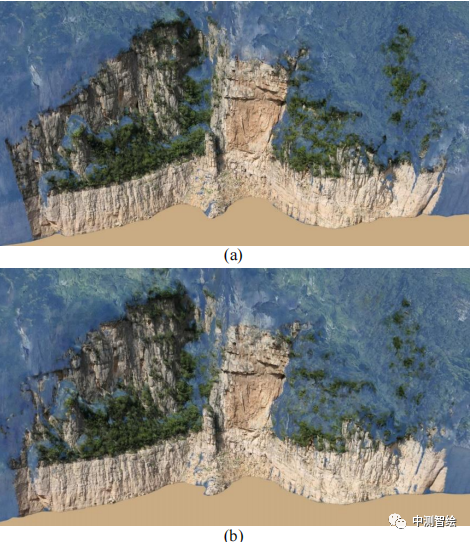
为了评价融合三维激光点云后建立的三维模型与单纯无人机倾斜摄影测量建立的三维模型效果,分别建立了三维模型,模型的效果如图13所示。对比模型的表面可以直观地看出,融合了激光点云之后建立的三维模型,墙面更加平整,底部效应得到改善、拉花现象明显减弱,模型效果得到极大优化。
▼ 图13▼
不同方法联合建模全局效果对比,(a)无人机影像单独三维重建结果,(b)单独地面激光点云三维重建结果,(c)点云影像融合处理三维重建结果局部

实验表明,三维激光扫描点云数据的融合,有效改善了倾斜摄影测量三维模型的建模效果,建模精度更加均匀可靠,同时还免除了倾斜摄影测量中外业像控点的布设,提高了外业效率,降低外业工作人员劳动强度。
- 结束语 -
▼
本文对实景三维模型常见问题从影像获取、点云数据融合两方面进行了探讨。利用实际案例的空三结果与及三维模型结果证实了分层航飞与单镜头环绕飞行在不同地形中有着各自的优势,且在Mirauge3D软件的辅助下,可以顺利完成数据处理,无需操心特殊飞行带来的数据处理难题。随后我们提出了一种船载影像数据和倾斜航空影像空地联合建模新方法,无需人工选择控制点,具有较高自动化水平,且通过与常用的人工控制点编辑方法的对比,表明本方法在总体效果上虽稍差于人工控制点编辑方法,但实际建模效果与精度完全可以常规三维模型应用场景的精度需求。倾斜航空影像和地面激光雷达数据的空地联合建模方法,通过对比无人机影像单独三维重建结果、地面激光点云单独三维重建结果与点云影像融合处理三维重建结果,证实了两种数据的融合有效改善了倾斜摄影测量三维模型的建模效果与精度,同时还免除了倾斜摄影测量中外业像控点的布设,提高了生产效率。
本文标签:倾斜摄影 实景三维 融合建模 精细化三维模型
发布时间:2021/07/02 17:39:18 文章来源:实景三维建模_数字孪生解决方案_冰柏科技 阅读量:789
分享: