








一、前言
本文阐述利用无人机倾斜摄影手段进行数据获取,结合Mirauge3D及Terrasolid等行业软件,进行4D产品生产的一种作业方式。
二、技术路线
采用横空六号无人机搭载DG3五镜头倾斜相机进行数据获取,利用Mirauge3D软件进行正射影像(DOM),实景三维模型(3DM),数字表面模型(DSM)的生产,使用TerraSolid软件生产数字高程模型(DEM)。技术路线如下图:
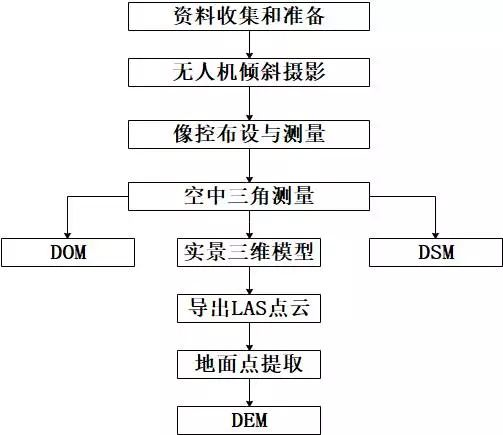
图1:技术路线图
三、实际生产作业实施流程
1. 资料收集和准备工作
正式作业前,收集测区相关资料,制定无人机倾斜航飞技术方案,明确测区范围、地面分辨率、影像重叠度、飞行航高飞行架次等信息,进而实施航飞作业。
2. 无人机倾斜摄影
(1)硬件设备飞图Air系列电动垂起复合翼无人机1架,该无人机,翼展2.5米,支持PPK差分模式,固定翼续航模式≧120分钟;旋翼续航模式≧28分钟,抗风等级5级(10m/s),可无需遥控器,自动垂直起降。

图2:无人机示意图
无人机搭载的睿铂DG3pro倾斜五镜头相机,如下所示:

图3:相机示意图
(2)像控点布设以及测量根据项目实际需求,参照谷歌地图,对测区内情况做分析,预选像控布控;具体布设方式参照内业预选位置,结合实地情况选择明显标志、地物点作为像控点,并拍照标记方便制作点之记文件。
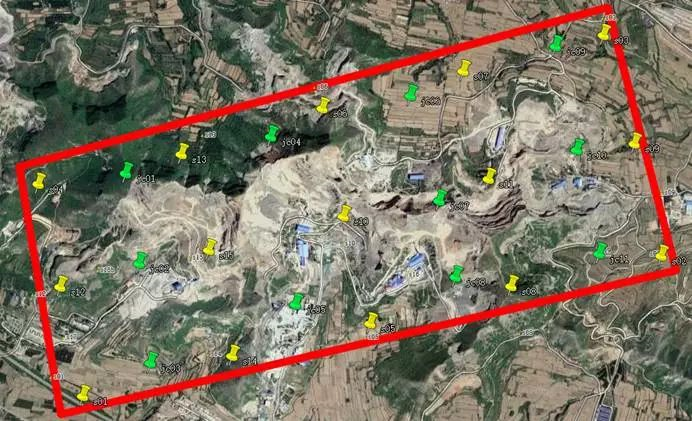
图4:像控点预选点分布图(现场情况特殊与实际有出入)
(3)依照外业航空摄影测量规范及测区实际地形设计航飞范围和路线。按照技术要求,获取对应分辨率倾斜影像数据,其航线设计如下图所示:
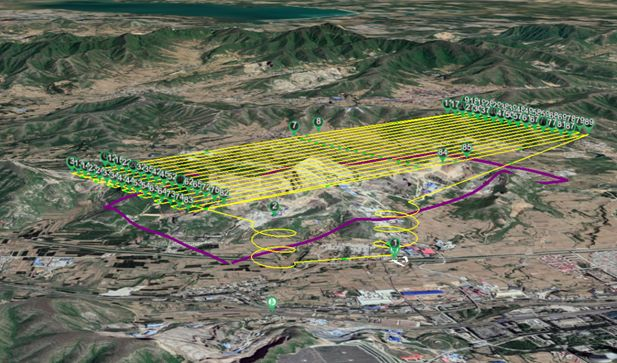
图5:航线设计图
3. 空中三角测量计算
将影像数据、POS数据以及控制点数据导入Mirague3D软件中进行空中三角测量,分别经过自由网空三、像控点量测、区域网平差。
3.1 自由网空三
Mirague3D处理大数据量照片,空三不需要预先测量控制点,可依据照片pos信息直接提交空三,完成自由网后。通过结合POS系统提供的外方位元素和相机安装位置关系,可以模拟包括倾斜影像在内的所有影像的地表投影范围,采取由粗到精的金字塔匹配策略,在各级影像上进行同名点自动匹配,恢复摄影瞬间摄像机的相对位置姿态和相机内参数,自由网结果如下图所示:
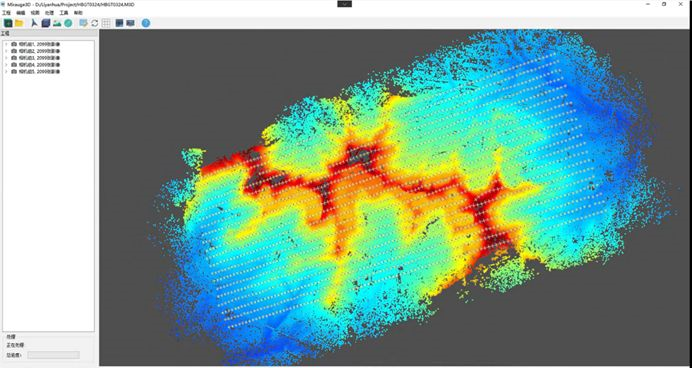
图6:自由网示意图
3.2 像控点量测
在完成自由网构建后,将控制点与影像进行人工关联操作,有效的控制点集合需要包含3个或以上的控制点,且每一控制点均具有2张及以上的影像刺点。
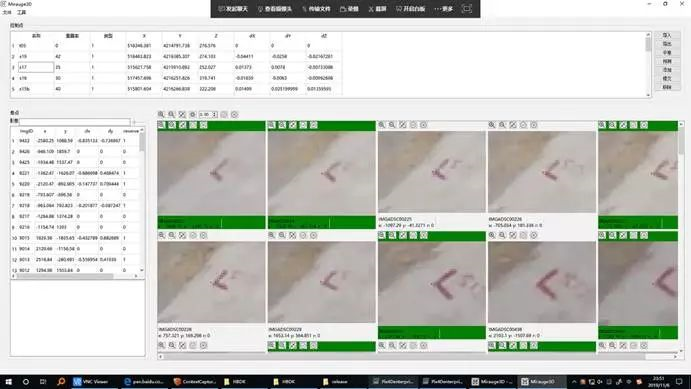
图7:控制点量测示意图
3.3 带准确控制点信息的区域网平差
通过建立连接点和控制点坐标文件,实现多视角影像自检校区域网平差迭代计算,通过多次反复联合解算,最终得到符合精度要求的平差结果。
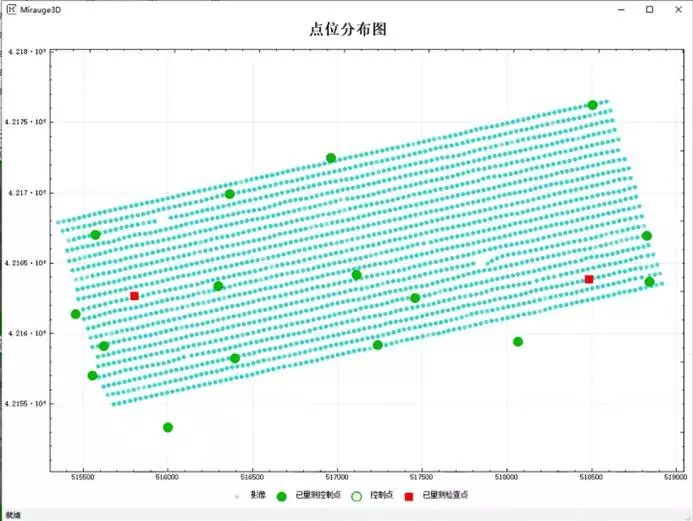
图8:像控点分布图
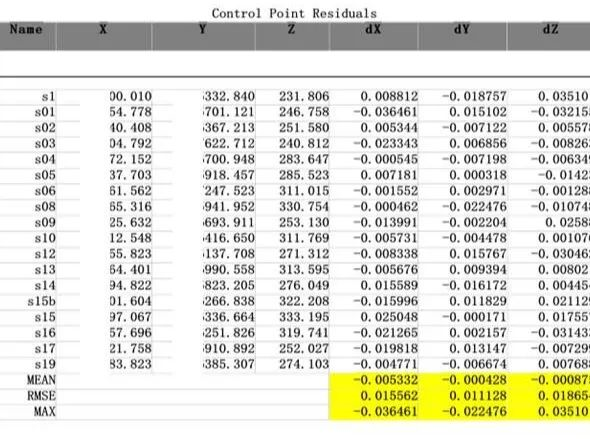
图9:部分控制点精度报告
3.4 DOM和DSM生产
通过区域网平差,得到符合精度要求的平差结果后,在Mirauge3D软件中一键式自动生成DOM和DSM成果数据。
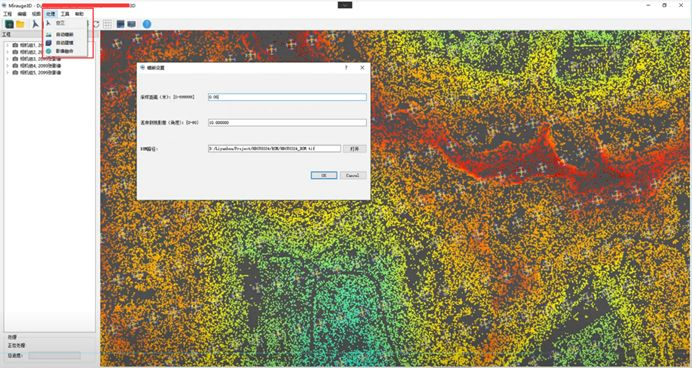
图10:DOM和DSM生成图

图11:DOM示意图
3.5 三维模型(3DM)生成
在Mirauge3D软件中,空三精度合格后,对其设置片区,调整模型输出范围、调整大小,提交三维重建,待任务完成后,可以获得高精度的实景三维模型成果。
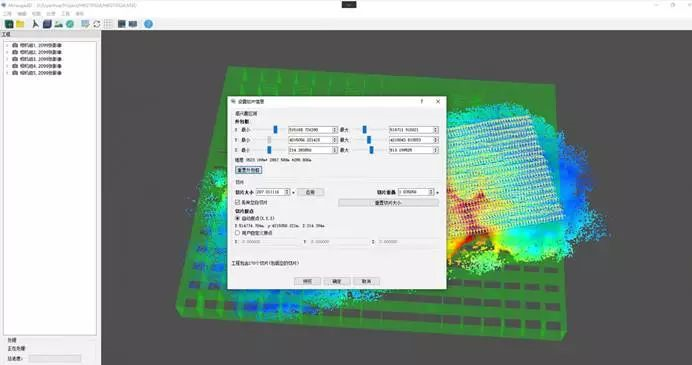
图12:三维模型生成图部分模型效果图

图13:三维模型效果图一

图14:三维模型效果图二
3.6 导出las点云
在软件中,按照片区将las点云导出,格式选择.las格式,点云示意图如下:
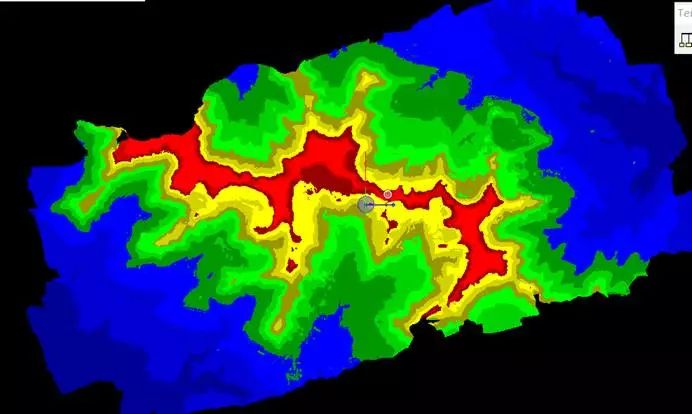
图15:点云示意图
3.7 地面点提取
将匹配得到的点云加载到Terrasolid中进行滤波得到地面点。软件分类地面点云采用迭代三角网滤波法,从点云中选取最低点以及一定高差范围内的地面点作为地面种子点,建立最初的稀疏三角网,计算点云中剩余各点到三角网的夹角、距离等信息,与设定的迭代角、迭代距离进行比较,小于所设的迭代值,接受为地面点,否则拒绝接受为地面点,重复以上迭代,直到三角网不再有新的地面点加入,实现三角网加密,从而得到准确的地面点。其实际操作步骤如下:
(1)点云重置到默认图层
把所有Las点云放置到默认层(0层或者是1层)。依次点击T-Scan的菜单工具栏【Tools】-【Macro】弹出“Macro”对话框,如下图:
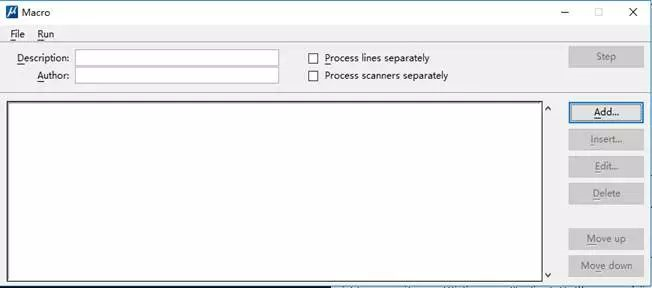
之后点击右侧【Add】按钮,添加宏命令,弹出“Macro Step”对话框,如下图:
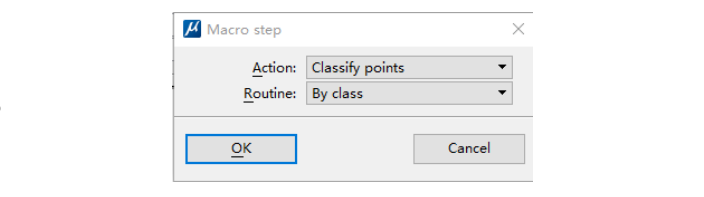
该命令可以将某一图层类或者全部图层类的点云划分到另外一个图层。上图的参数,即可将所有的点云划分至Class 1图层中。点击【OK】,即可将该命令添加到宏命令列表中。
(2)去除孤立点
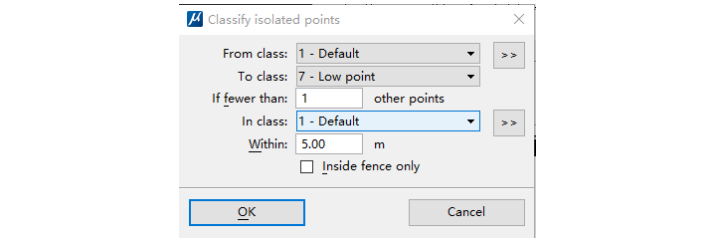
在完成上一步操作后,我们需要把孤立的噪声点去除掉,孤立的噪声点指高出地面很多,或者低于地面很多的噪声点。依次点击T-Scan的菜单工具栏【Tools】-【Macro】弹出“Macro”对话框。如果已经在“Macro”对话框界面,则直接点击【Add】按钮添加宏命令,弹出“Macro Step”对话框,选项【Action】保持默认,在【Routine】处选择分类方式为【Isolated points】,之后点击【OK】。弹出如下界面:
(3)去除低噪声点
去除孤立点完成后,继续用“Low point”算法去除低噪声点,因为后期粗分类,使用的算法是选取最低点构成Tin,其余点和Tin进行对比,所以需要把无效的低噪声点去除。在打开的“Macro”界面中(如果打开Macro界面,这里不再描述,上面部分有相应内容),点击Add,弹出 “Macro Step”对话框,,选项【Action】保持默认,在【Routine】处选择分类方式为【Low points】,之后点击【OK】。弹出如下界面:
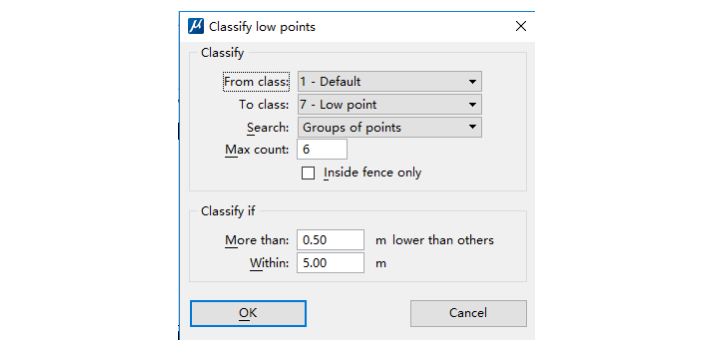
Classify if处意思为:如一个点与周围 5m 以内的所有点比较,若比周围的点距离>0.5米,则认为该点为低点。如果该值选得太小,则有可能把正常点弄成低点。不一定非要强行把所有的噪点去掉,这样会损失精度。7.4 提取地面点去除噪点算法添加完毕后,接下来在宏命令中添加提取地面点(分类出地面点)的算法。在打开的“Macro”界面中,点击Add,弹出 “Macro Step”对话框,,选项【Action】保持默认,在【Routine】处选择分类方式为【Ground】,之后点击【OK】。弹出如下界面:
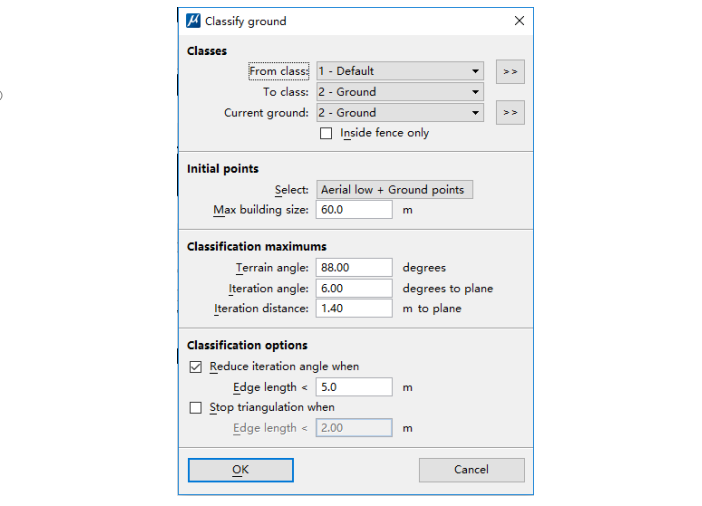
Classes处的参数和前面几个滤波参数类似。一般来说,可以改的有:Max building size和 Iteration angle。
(4)补地面点
上一步提取地面点完成后,可能会把一些地面点也给去掉了。比如:如果对上一步的点云构Tin显示,则很可能出现在一块平整的区域,本应该是比较均匀的地面,但出现了“白色”——非地面,这就说明把地面点也去掉了,此时需要补上。即,离地面很近的点,仍认为其是地面点。
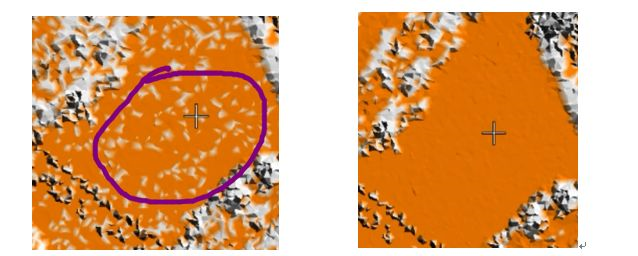
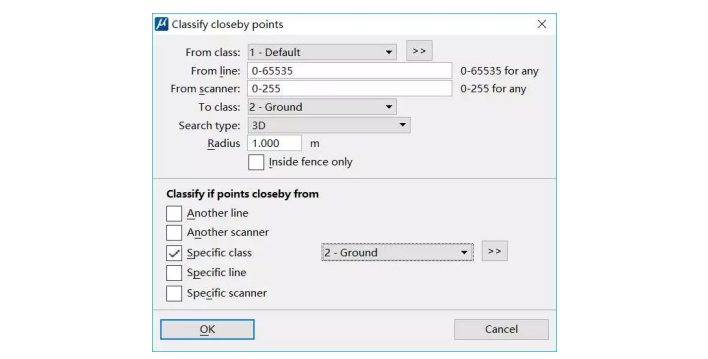
步骤如下,在打开的“Macro”界面中,点击Add,弹出 “Macro Step”对话框,,选项【Action】保持默认,在【Routine】处选择分类方式为【classify closeby】,之后点击【OK】。弹出如下界面:
(5)运行宏命令
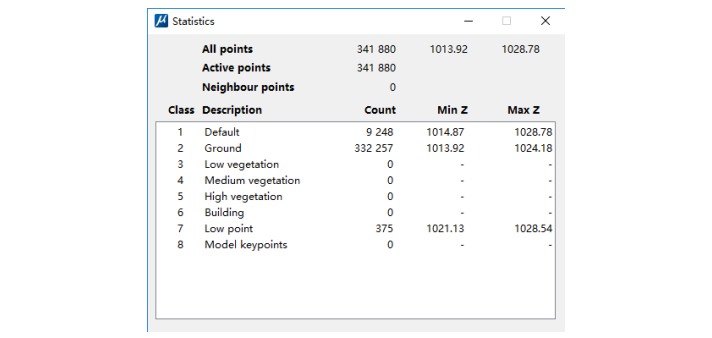
在“Marco”窗口中点击【Step】,软件会依次的运行宏命令,选中的宏命令运行完毕后,会自动跳到下一条宏命令。可以随时在T-Scan菜单工具栏中,依次点击【Tools】-【Show statistics】打开“statistics”对话框,查看各图层类的点云数量。如下图:
(6)分类效果预览
可以生成一个DEM地面模型(surface model),效果会更直观。
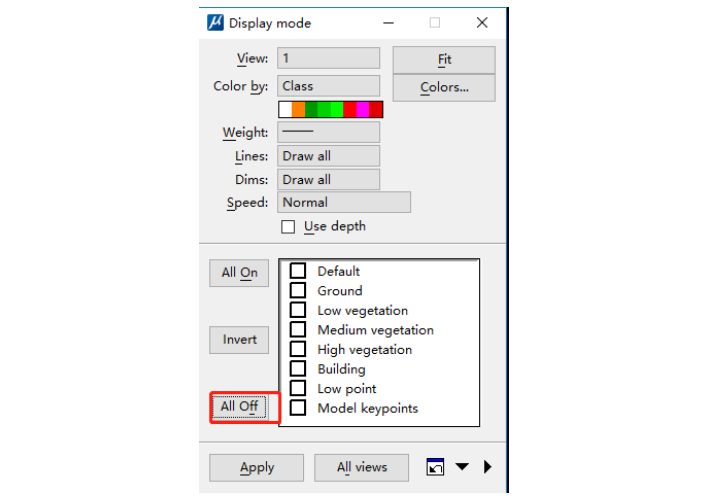
1)如果现在加载了全部点云,且处于显示状态,则首先设置不显示所有点云。在T-Scan菜单工具栏中,依次点击【View】-【Display mode】,弹出“Display mode”对话框,设置不显示所有点,如下图:
2)加载T-Modelor程序。之后长按【Display surface】按钮,选择其中的【Display shaded Surface】按钮

3)在T-Scan工具栏中长按【Model】,选择【Create editable model】

4)弹出“Create editable model”界面,如下图:
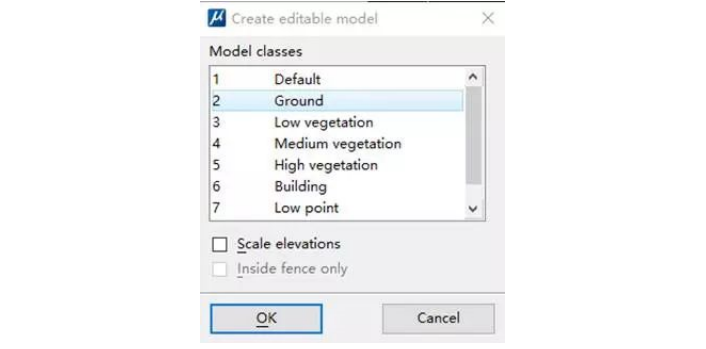
5)选择Ground类别,即Class 2,点击【OK】。弹出“Surface settings”界面,输入一个名字,如02,如下图:
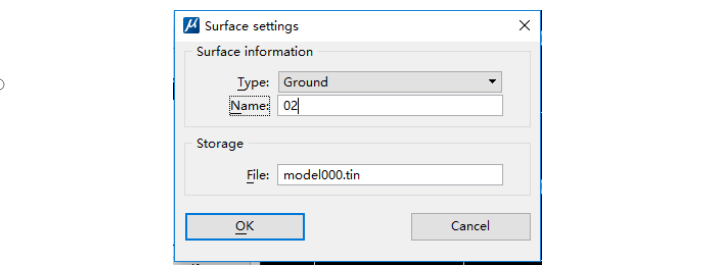
6)在T-Modeler工具栏上面“Display Surface”按钮处长按,在弹出的菜单中选择【Display Shaded Surface】

7)工具,点击OK。弹出“Display Shaded Surface”窗口,如下图:
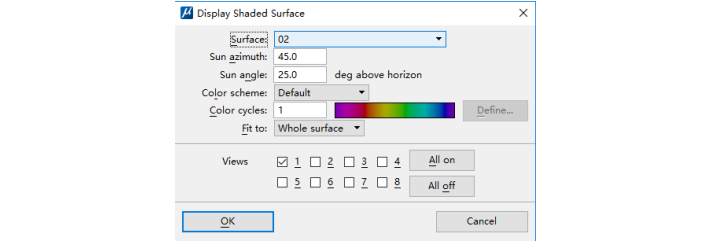
8)生成DEM
通过构建三角格网并进行适当的DEM编辑,然后得到DEM成果。
a. 在“Project” 窗口中,打开分类后工程的(软件在宏命令批处理运行完成后,会自动在点云保存文件夹下面保存一个和原工程同名的工程)。
b. 依次点击【Tools】-【Export lattice model】,弹出“Export lattice model”窗口,如下图:
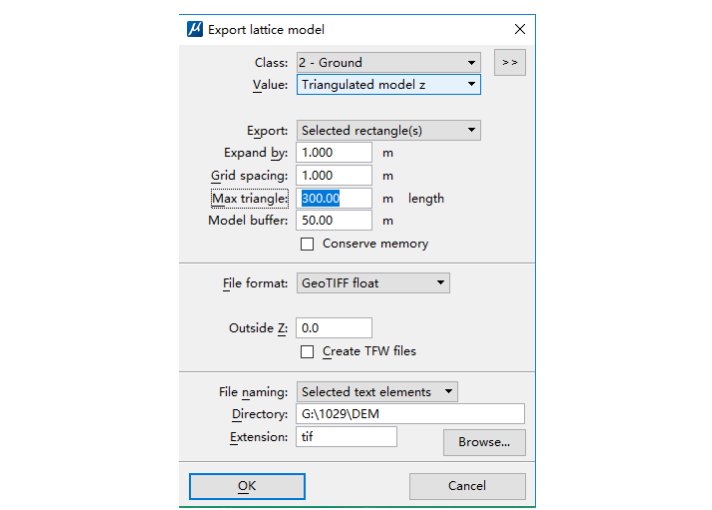
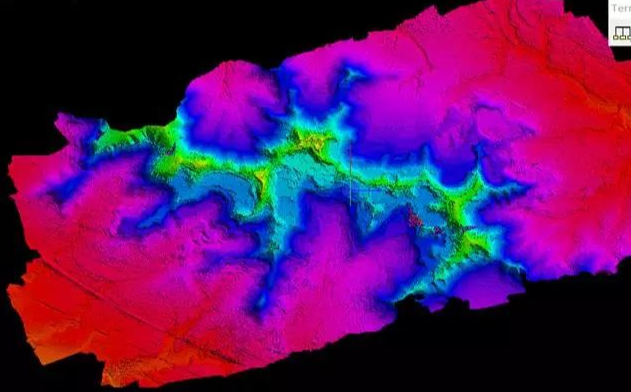
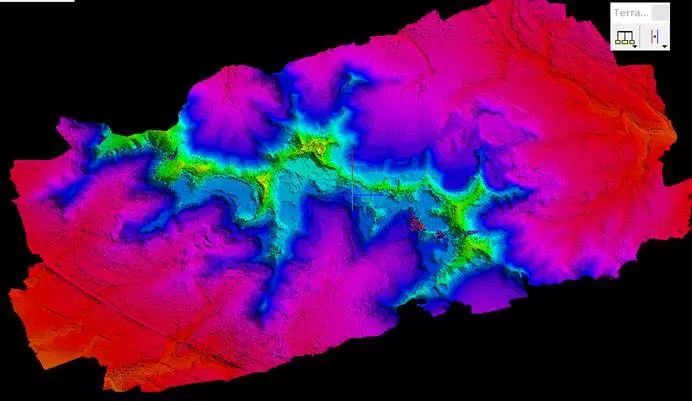
c. 查看DEM加载生成的DEM成果,可以考虑添加栅格数据或者是在线的栅格数据,DEM效果如下图所示:
四、总结
无人机倾斜摄影技术具有高效可靠、较低成本的优势,本文所述的Mirauge3D与TerraSolid 软件结合,实现测绘4D产品的生产仅作为一套实施方式,仍有不足之处,仅供参考。
文章来源:中科北纬公众号






{kind=link}