1. 项目概述
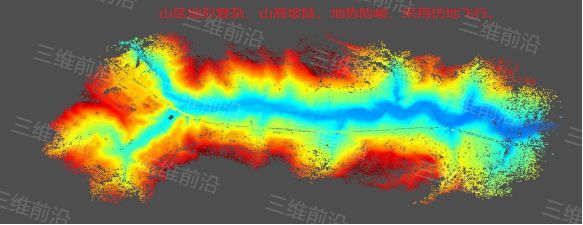
该项目位于云贵高原1000米海拔的重庆山区,地势起伏较大、山高坡陡,飞行难度极大。

2. 技术路线
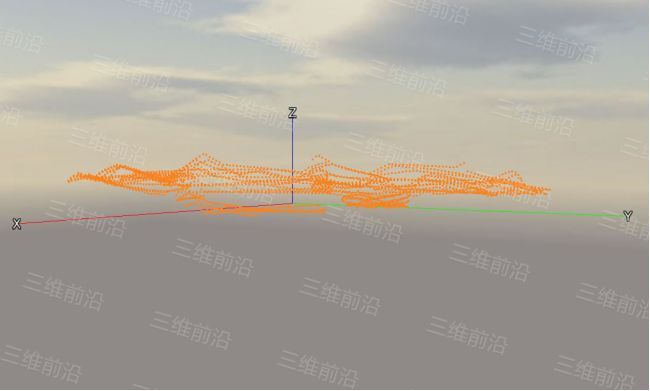
为了保证地面影像分辨率达到5公分要求,必须采用仿地飞行方式采集数据。本项目最终选择的是厦门致睿智控ZR-M66六旋翼无人机搭载五镜头倾斜相机进行倾斜影像的数据获取,利用Mirauge3D软件进行空三加密,再构建实景三维模型和真正射影像、DSM。
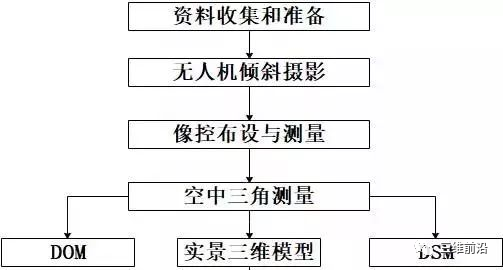
3. 实际生产作业实施流程
3.1 外业概况
(1)正式作业前,收集测区相关资料,制定无人机倾斜航飞技术方案,明确测区范围、地面分辨率、影像重叠度、飞行航高飞行架次等信息,进而实施航飞作业。像这种地势险峻的地方,得严谨地考量整个地形情况,在完美避开每个雷区的同时满足地面分辨率、影像重叠度等数据精度,它十分地考验飞手的心理素质和飞行技术。
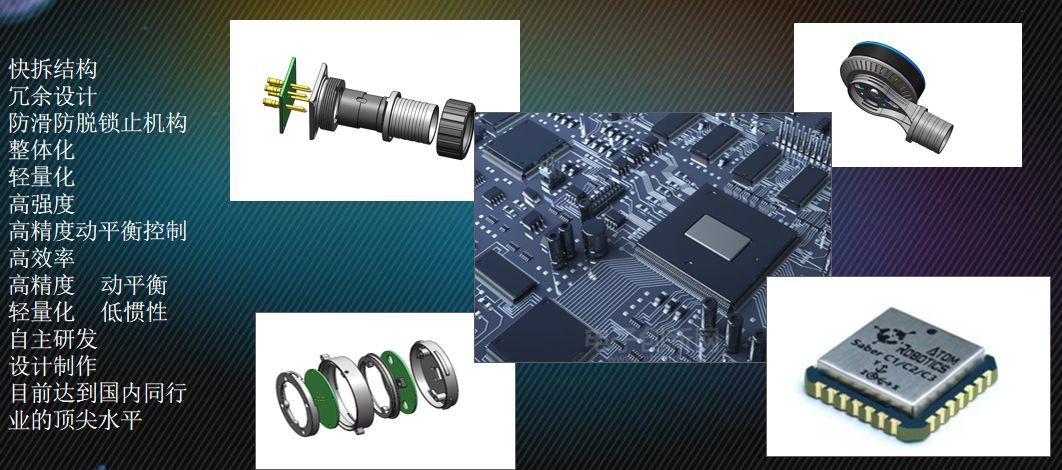
(2)飞行平台采用的是ZR-M66六旋翼无人机,这款产品方面具有多项非常显著的优势:空载续航60分钟,挂载相机续航55分钟,作业效率非常高。飞机起飞重量不足7KG,抗风达到7级,产品便携性好,无人机的机臂、螺旋桨、脚架、电池、挂载板、相机采用快拆结构,都可以拆卸下来,除了电池和相机、挂载板外的所有组件可以存放在一个24寸的登机箱包,使得做项目的时候可以带上设备上民航托运,如果是开车也可以轻易得放在绝大部分小轿车的后备箱;飞行系统是基于底层开发,可仿地飞行,不设定电子围栏,在限飞的应急航飞项目区域内可以随时起降,不像别家产品需要申请空域了才可以航飞,耽误宝贵作业时间。




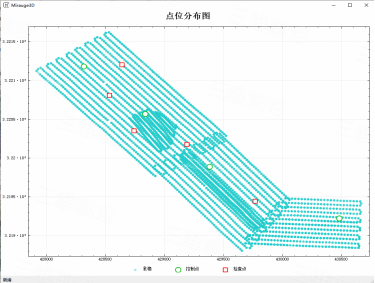
(3)像控点布设以及测量根据项目实际需求,参照谷歌地图,对测区内情况做分析,预选像控布控,尽量选取空旷无遮挡的地方布控。

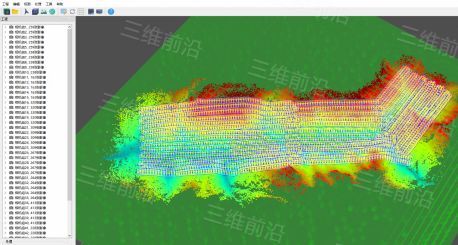
(4)依照外业航空摄影测量规范及测区实际地形设计航飞范围和路线。按照技术要求,获取对应分辨率倾斜影像数据,其航线设计如下图所示:

3.2 内业详细流程
3.2.1 空中三角测量
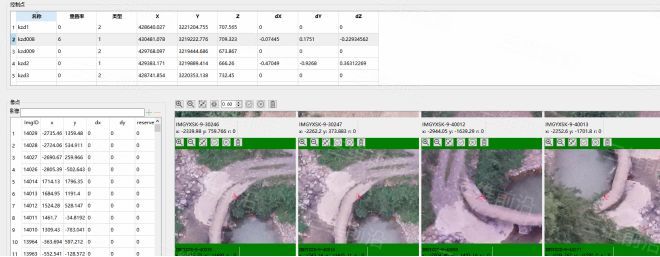
空中三角测量:将影像数据、POS数据以及控制点数据导入Mirague3D软件中进行空中三角测量,分别经过空中三角测量、刺像控点、区域网平差,再最后生成三维实景模型。
Mirauge3D软件:采用自创的并行空三与递归式融合技术,将多块空三结果融合成一个整体,突破海量城市倾斜数据处理效率瓶颈,提高空三处理效率和精度,也避免了接边问题。仿地飞行的奇特数据,大面积的倾斜数据,不同高度的不同相机的多元数据,弱纹理数据等等,空三一遍通过,而且用时少,效率高。

对于海量无人机倾斜摄影数据,往往存在只有GPS而无IMU的情况,如果仅根据GPS坐标搜索相邻影像,对于斜片往往无法得到正确的邻近影像结果。对此,Mirauge3D采用机器学习的方法,在不需要影像姿态值的情况下自动为每张影像寻找邻近影像,进而极大地提高空三特征匹配效率。
3.2.2 刺像控点
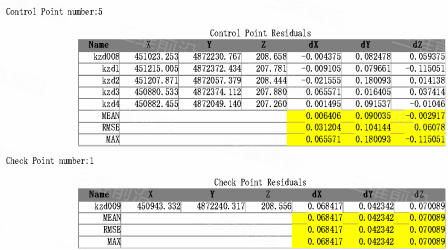
空三完成后,将控制点与影像进行人工关联操作,每一个控制点在刺8张及以上的影像较好,控制点一般要刺在东南西北四个角落以便控制整个区域,控制点在3个及以上的有效。
3.2.3 区域网平差
通过空三加密后的连接点和控制点坐标文件,实现多视角影像自检校区域网平差迭代计算,通过多次反复联合解算,最终得到符合精度要求的平差结果。
3.2.4 生产实景三维模型
在Mirauge3D软件中,平差后,控制点满足精度要求后,即可调整模型生产范围,提交三维重建,最后获得高精度的实景三维模型。



3.2.5 生产DOM和DSM
在Mirauge3D软件中一键式自动生成DOM和DSM成果数据。