2026-07-08
为什么Mirauge3D处理大面积倾斜空三又快又稳?
倾斜空三是三维建模的关键步骤,是重中之重的环节。倾斜影像空三是指解算相机参数、影像位置和姿态,以及加密点三维坐标的过程。倾斜影像空三整体流程主要分为影像特征点提取与匹配、构建自由网以及带控制数据的倾斜影像光束法区域网平差的三个步骤,空三处理的效果决定我们后期处理效果。
然而,当我们在实际生产过程中,往往会遇到软件空三运行完成后,空三结果出现断裂、分层、弯曲等等现象,即使最后通过人工干预,也是耗费大量的心力!
Mirauge3D的空三解决方案,能有效解决倾斜海量数据空三的痛点,做到处理大面积倾斜空三时又快又稳,主要体现在以下几个方面:
(1)支持多相机数据,相机数量无限制;
(2)支持从手机、卡片机、单反至专业亿级像素大幅面航摄仪的高精度空三;
(3)无需IMU姿态信息。小数据量(如<5000张影像)时无GPS数据即可进行空三,在仅需要GPS数据的情况下,可在128G内存的机器上进行10万张级影像的高精度空三;
(4)支持并行分布式空三,将空三的整个作业流程完全并行化,充分利用多节点计算机算力,极大提高空三效率;
(5)支持高精度POS辅助区域网平差。可根据影像航带信息,在区域网平差中对GPS航带误差进行改正,在仅使用稀疏地面控制点(四角+中心)的情况下即可获得高精度平差结果;
(6)空三结果稳定,不存在多次空三结果不一致的情况;
(7)对于海量数据,采用并行空三和融合的策略,极大地提高了空三效率,采用独创的空三融合算法,使最终得到的每个相机、每张影像仅有唯一的参数,避免了接边问题;
(8)有强大的自检校功能。只需用户输入初始的焦距值,在平差过程中自动检校计算其他相机参数。将用户从繁琐的相机畸变参数转换工作中彻底解放出来,完美处理存在较大畸变的各类相机采集到的照片。
Mirauge3D的空三解决方案有两种方式,具体如下:
(1)用户可以直接在Mirauge3D中完成整个空三和建模的全流程,从原始数据的准备到空三的处理以及后期三维模型的建立及成果输出;
(2)用户可以在Mirauge3D完成倾斜空三的处理,包括量测控制点,进行带控制点的平差,然后将Mirauge3D空三结果导入其他建模软件中(如:ContextCapure、Pix4DMapper等);相机参数、影像外方位元素、控制点信息等都可以无损导入过去,直接使用Mirauge3D的结果进行建模,不需要再一次进行空三。
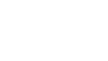
案例一:海量倾斜影像分布式空三
数据难点:数据量相对较大,工程区域内大面积为弱纹理水域
影像数量:175,787 张
GSD:0.02m
空三节点:10 个
空三总时长:约50h
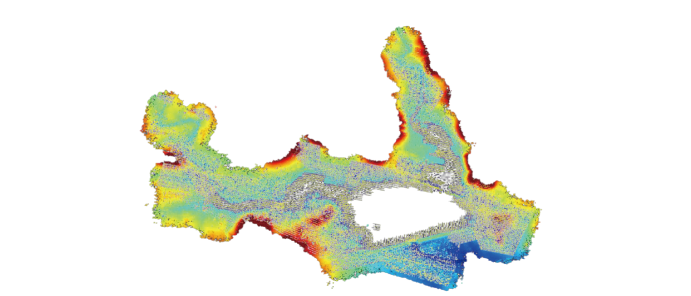
案例展示二:带状倾斜影像空三
数据难点:为长条河道数据,测区形状不规则,属于S型带状。数据全长约60km,航摄时间跨度约1个月
影像数量:130,000 张
空三模式:NormalAT
空三节点:20 个
空三总时长:约4天
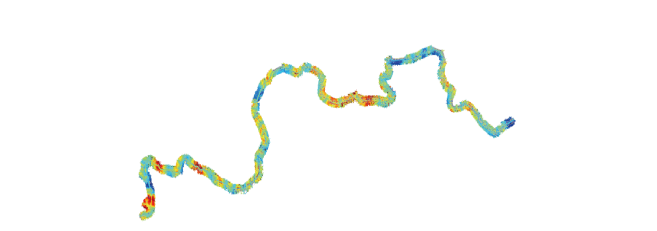
案例展示三:多源复杂数据
数据难点:测试数据包括不同航高的无人机影像,地面环拍,手持相机,室内拍摄等复杂多源数据,且部分影像衔接不连贯,使用M3D联合空三,整体一次通过
影像数量:6566张
GSD:0.04m
空三节点:1个
空三模式:NormalAT
数据种类:航空、地面、室内外、贴近摄影多源影像
分享: