2026-06-18
大型倾斜航摄仪(飞思)结合Mirauge3D的数据处理流程
引言
虽然,现阶段无人机倾斜作业盛行,但对于大面积、特殊敏感区域上空,能及时有效获取外业倾斜数据的问题上依旧少不了大型倾斜航摄仪的身影。对于此类型数据处理,Mirauge3D同样适用。本文以飞思航摄仪数据进行处理说明,给大家分享专业量测型倾斜航摄仪的处理流程。
飞思简介
提到飞思(PHASE ONE)相信很多爱好摄影的人会非常熟悉,作为全球首屈一指的数码相机系统品牌,源于丹麦,能够为专业级摄影提供科技尖端性能卓越的中画幅数码相机系统及RAW文件处理转换软件(CaptureOne)。飞思作为中画幅相机的代表,其优秀的成像能力,也被不同厂商选中进行方案整合。在大型倾斜航摄仪中,也有飞思相机的身影。这其中上海航遥推出的AMC5100 倾斜航空相机,于 2016年5月28日在烟台首次试飞成功,是目前世界上幅面最大的倾斜数码航摄仪,由5台高达1亿像素的phase one iXU-1000航空相机组成,能同时获取5个方向的倾斜影像,建立超高清晰度的实景真三维模型。

AMC5100数码航摄相机系统
项目概况介绍
1. 基本情况
为满足某市区域规划建设的需要,建设数字城市,实施测绘服务项目,进行倾斜摄影及相关成果的生产任务。成果要求:
- 比例尺为1:1000
- 数字正射影像
- 数字线划图
- 实景三维模型
2. 航摄情况
由于该地区特殊的地理位置,摄区机场密度较大,再加上地处主城区,因此航空摄影空域是个不得不面对的问题。经过多次研究,决定采用有人机作为航空摄影搭载平台,其搭载方式为舱内开口搭载。

航摄飞机及航摄仪
本项目航摄影像获取采用AMC5100 数码航空摄影仪。
3. 主要技术参数
单镜头传感器分辨率:116088708
像元 尺寸:0.0046mm
CMOS物理幅面:53.4mm40mm
最快曝光速度:1/1600s
倾斜角度:45°
ISO范围:50-6400
焦距:110mm
外业飞行
由于测区距离机场较近,附近军事活动和民用航班密集,航飞作业只能位于上午7:00到9:00之间。航飞时间段严重受到限制,因此外业实际飞行4天,共计8小时13分钟。获取外业原始影像11450张、像片外方位元素成果数据(EO)、控制点位坐标,飞机飞行日志数据等资料。

|-航飞记录表
1. 像控点布设及测量
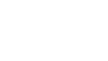
根据项目要求,对测区内情况做分析,按照每平方公里4-6个点密度,平均400米间隔预选像控布控;具体布设方式参照内业预选位置,结合实地情况选择明显标志、地物点作为像控点,并拍照标记方便制作点之记文件。
像控点布设分布图
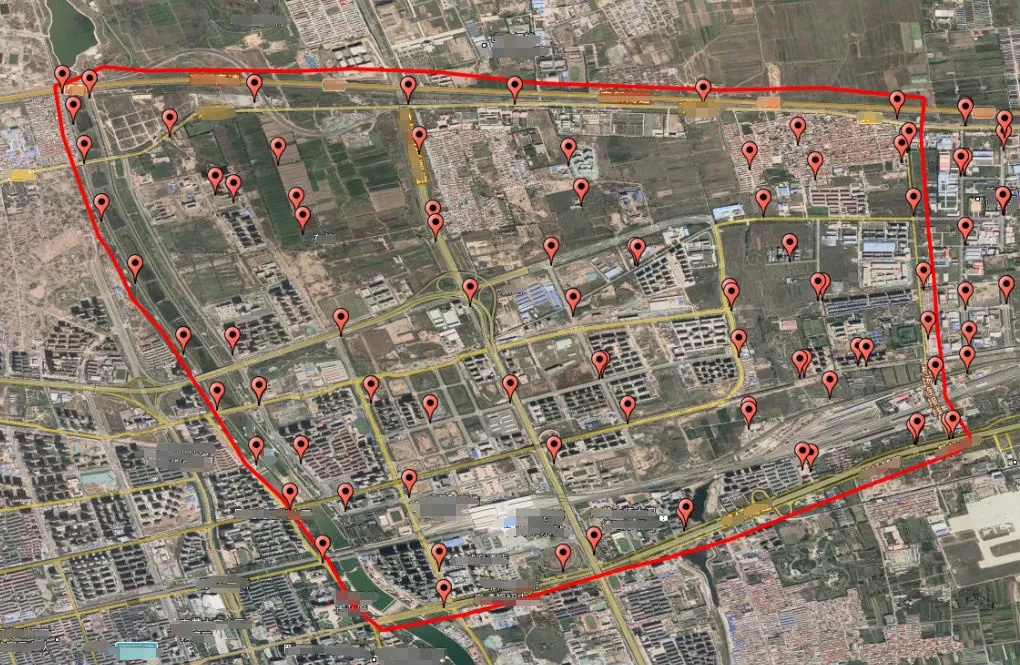
点之记文件记录表
像片处理
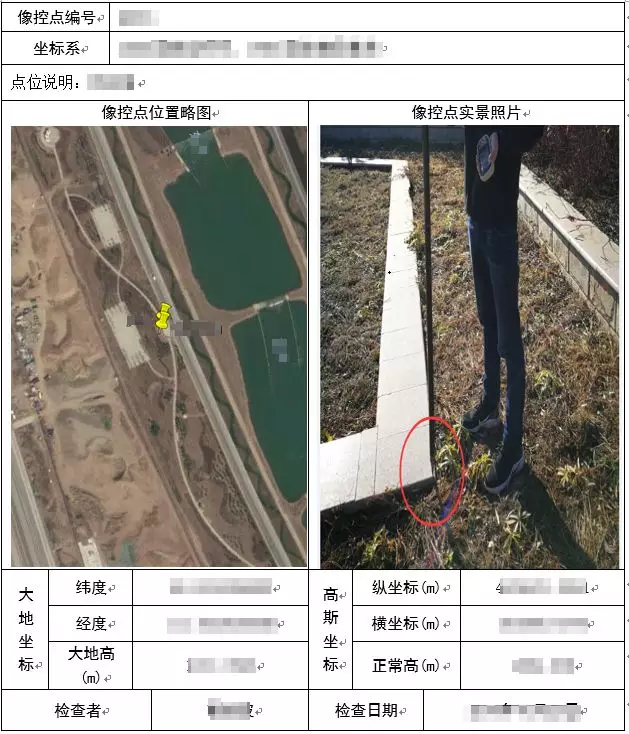
由于航飞时间的原因,导致航飞获取的影像整体色彩较暗,存在较多建筑物阴影。因此我们需要对于所获取的原始影像进行处理,以便于我们后续的数据处理。
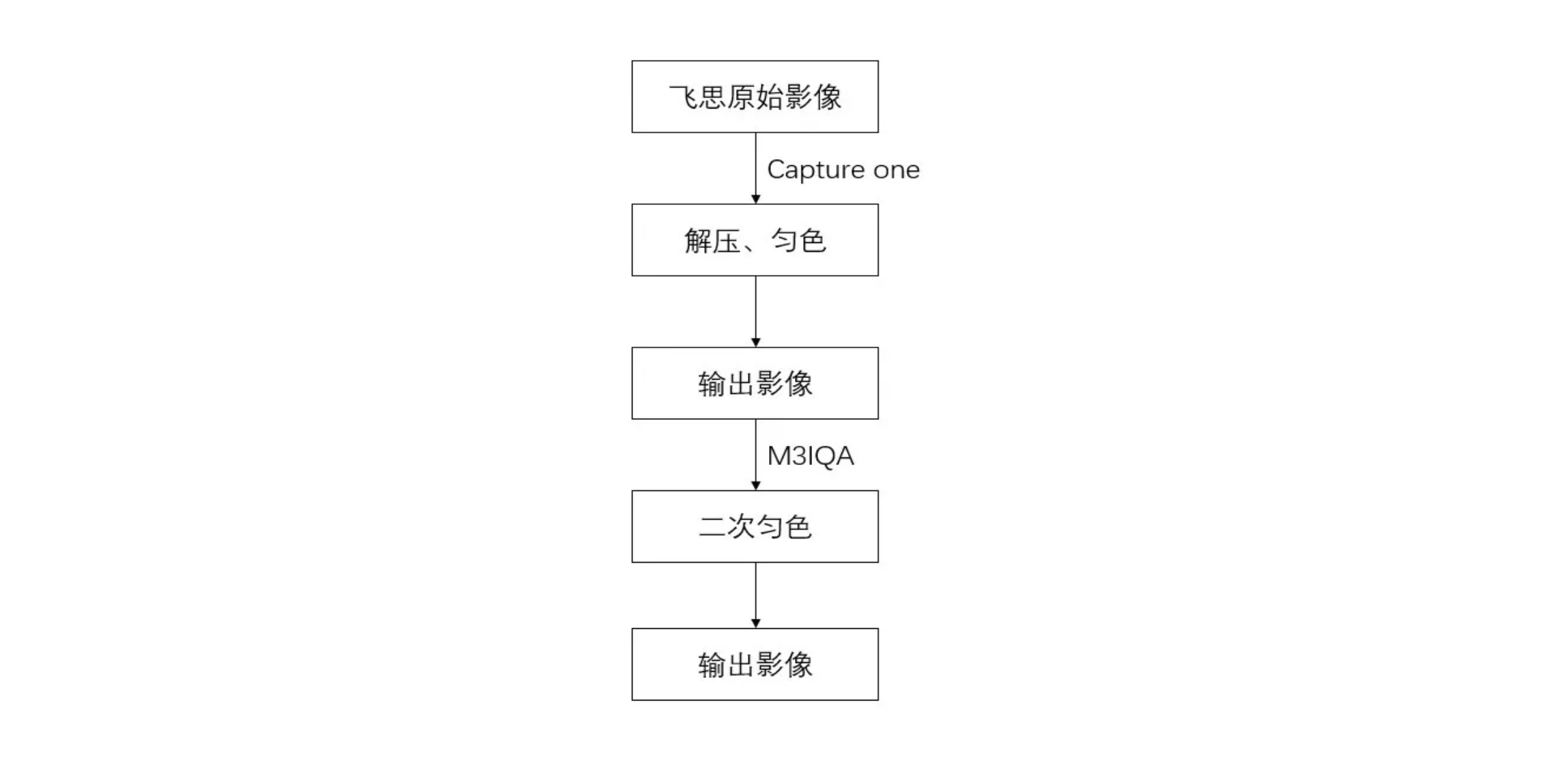
影像处理流程图
原始影像
由于飞思相机的特殊性,所获取的影像为RAW图像格式,利用常见的图像软件无法正常打开影像,只能用其独有的文件处理转换软件(Capture One)进行解压转换,调色等处理。下图为处理前后的对比。
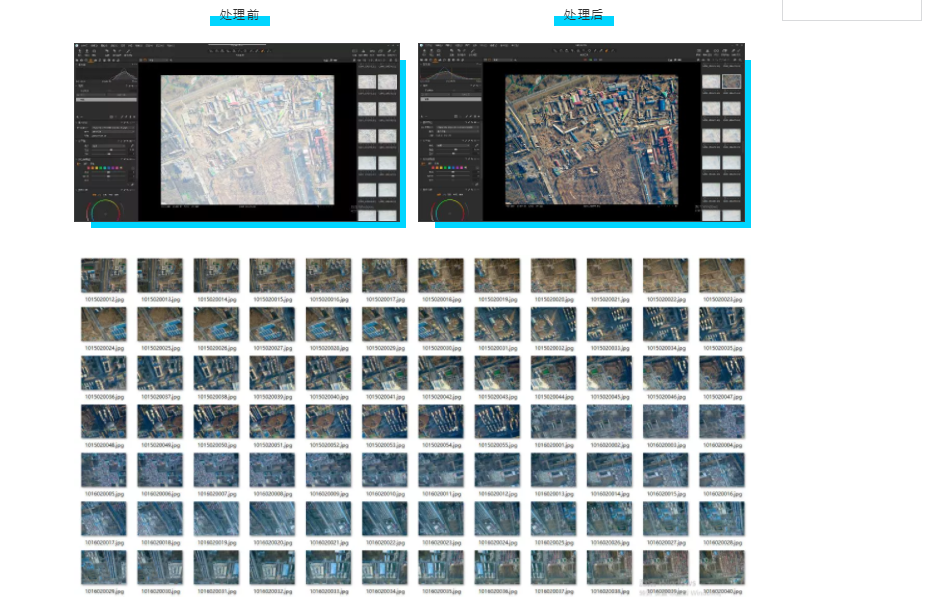
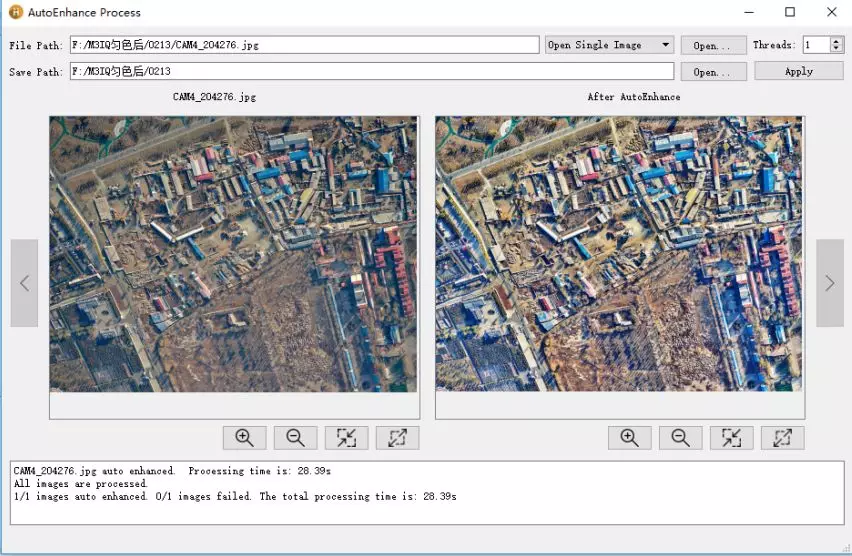
可以看出在经过Capture one软件第一次匀色后,像片的整体质量有所改善,但还不足以满足实景建模所需的要求,对此我们利用M3IQA对匀色后的数据进行二次匀色。
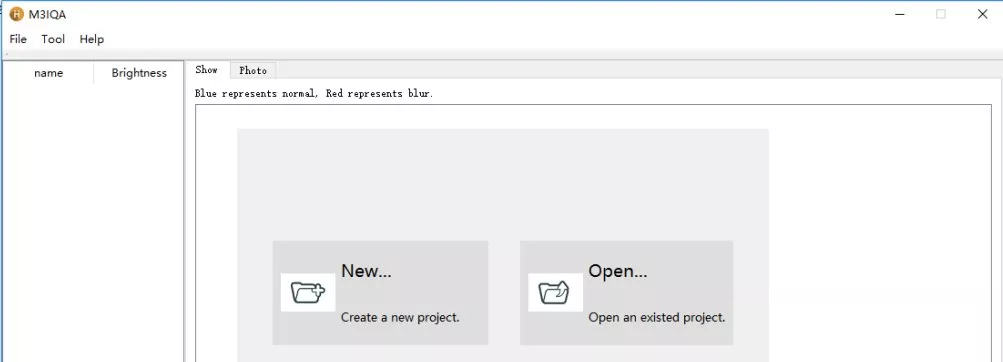
M3IQ是一款影像质量调整辅助工具软件,可以帮助用户检查采集影像是否满足后续生产和应用的需求。M3IQ针对航飞影像特点,可根据需求选择使用软件的影像去雾和自动增强功能,最终通过可视化的界面快速了解航线影像质量。

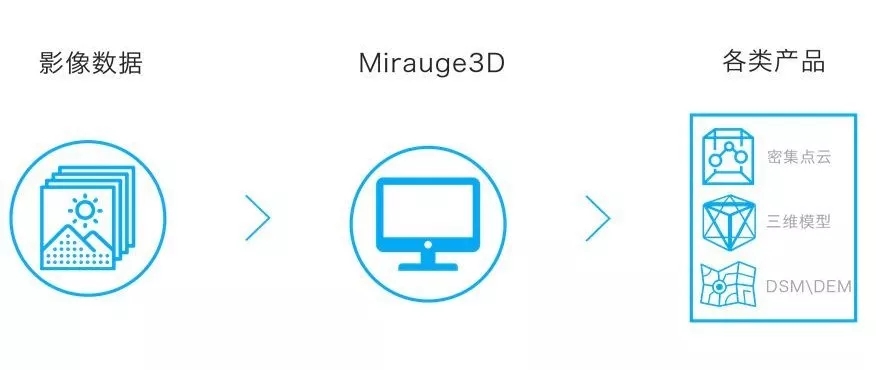
空三计算
本项目空三采用Mirauge3D软件进行处理,Mirauge3D能够快速实现大面积倾斜数据的处理,对于10万+左右照片数据,空三无需分区,可在无控制点情况下处理,空三通过率极高;并具有超快的平差速度,对于10万张左右的影像数据,64G内存下平差≤1小时。
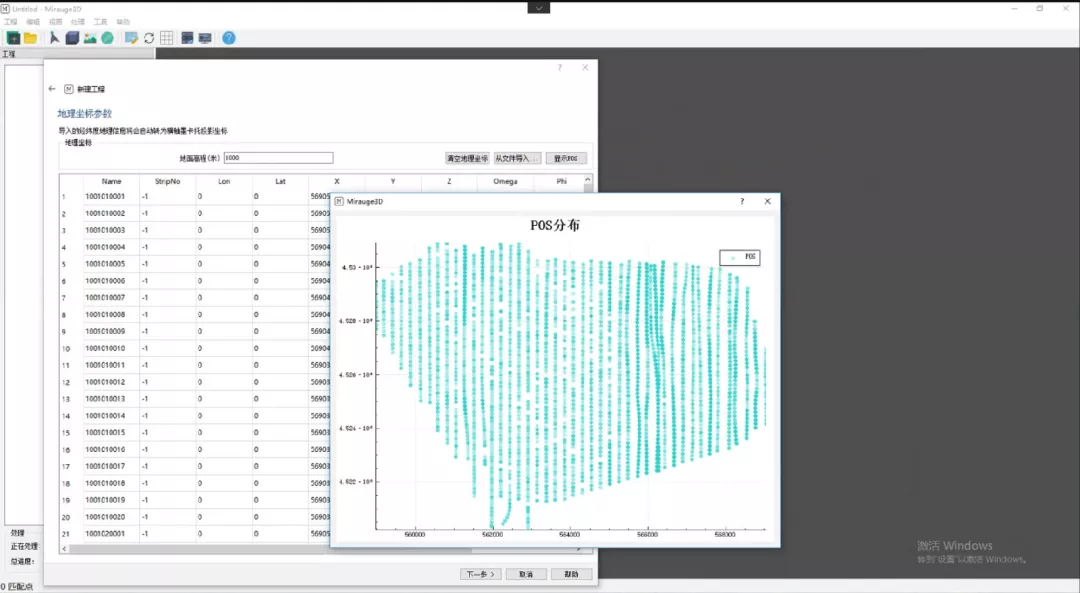
1. 建立工程
在Mirauge3D建立工程时,可手动选择配置好的机器作为主机,以便于最大化利用计算机资源。可有效避免集群处理时,空三靠后阶段软件随机选择到低配置主机致使空三易失败的情况,有利于提高空三成功率。
2. 空三集群处理
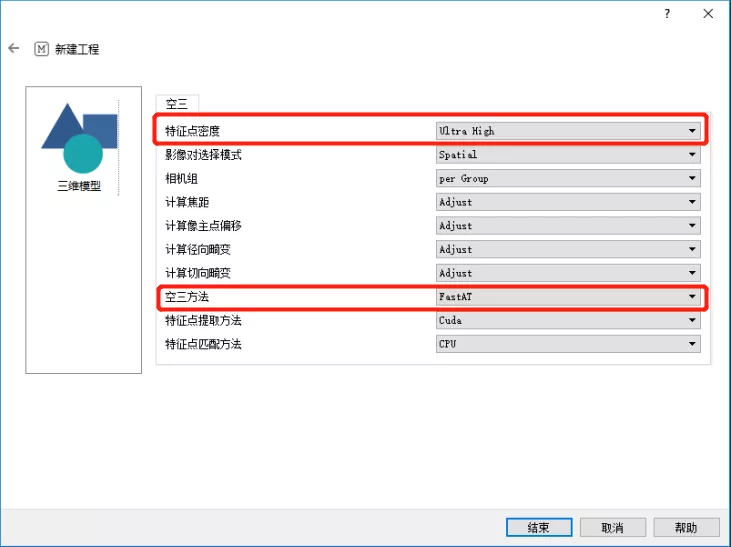
本工程采用FastAT、单节点、特征点密度为UltraHigh进行空三运算,空三分块用时47小时25分钟,融合2小时48分钟。(电脑配置 CPU:i7 9700k;内存:20G;显卡:quadro2000)
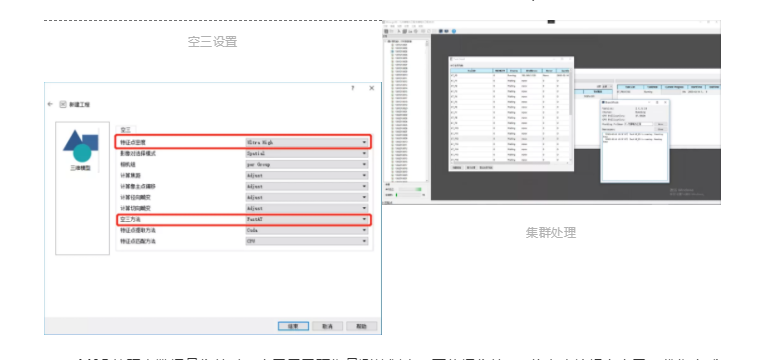
3. 空三设置
集群处理
Mirauge3D处理大数据量像片时,空三无需预先量测控制点。可依据像片pos信息直接提交空三,优先完成自由网空三成果,在此基础上进行控制点量测、平差。整个流程符合传统摄影测量软件空三处理方式如:PHOTOMOD、INPHO等,且空三成果可输出多种数据交换格式如:XML、PATB等。
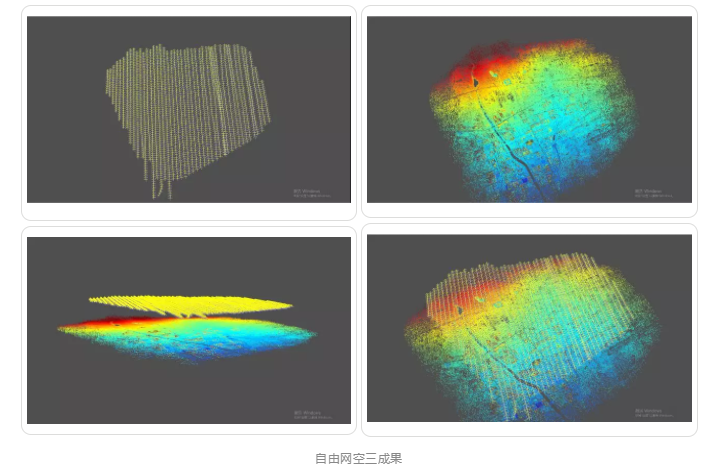
自由网空三成果
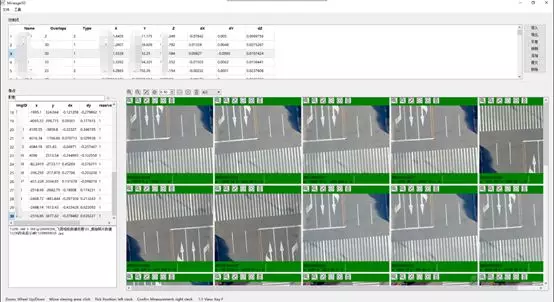
控制点量测
Mirauge3D控制点量测方式为半自动预测,可先量测测区的四个角点,利用前方交会,软件可快速在影像中预测出控制点的位置。
1. 控制点量测
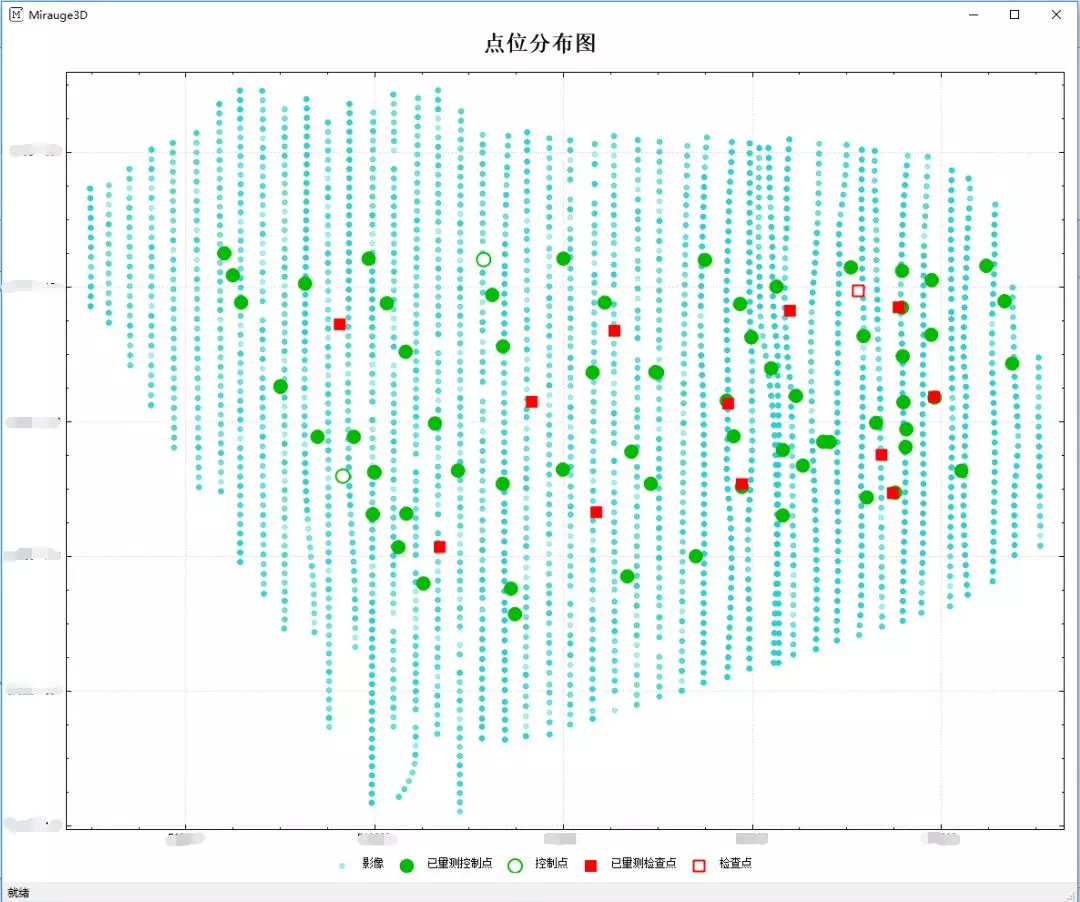
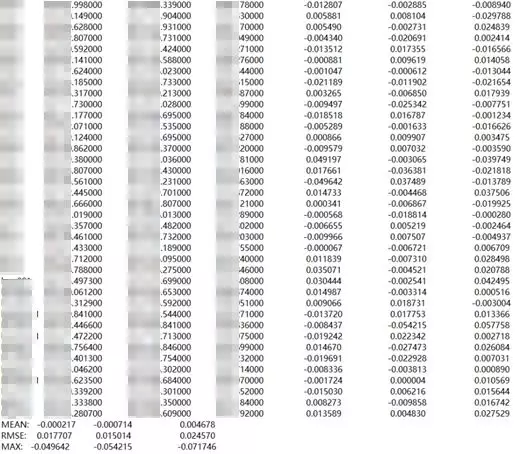
2. 控制点平差
Mirauge3D控制点平差无需反复提交空三,仅在自由网基础上做控制点平差,基于GPU/CPU协同的并行式高精度区域网平差,普通64G内存主机可平差50万张数据,10万张照片平差时间不足一小时。
控制点精度报告
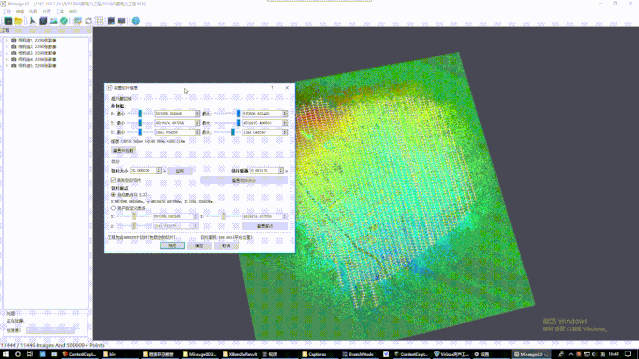
三维模型重建
空三精度合格后,对其设置片区,调整模型输出范围、调整大小,提交三维重建。
部分成果展示
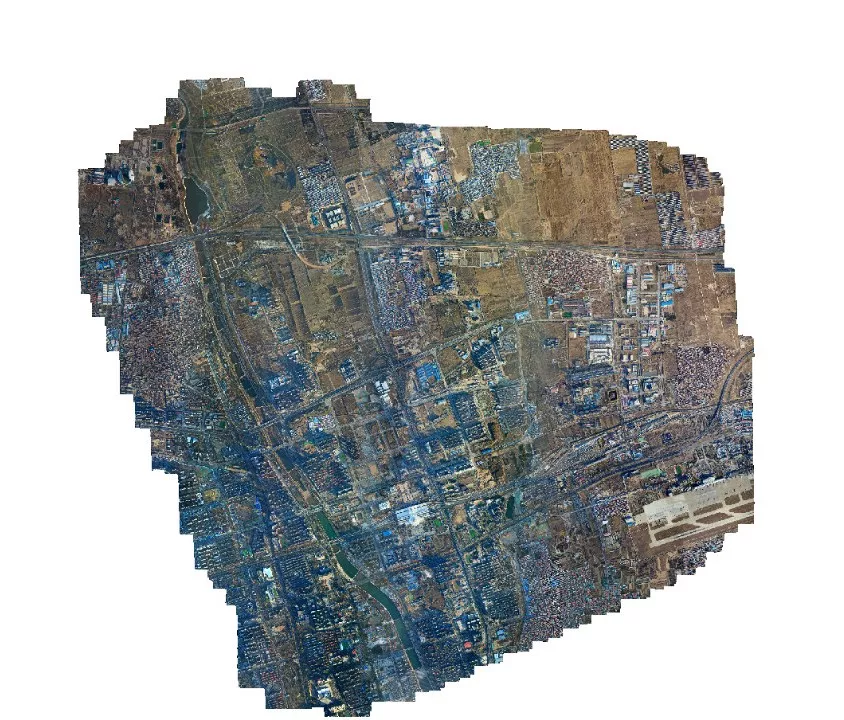
数字正射影像
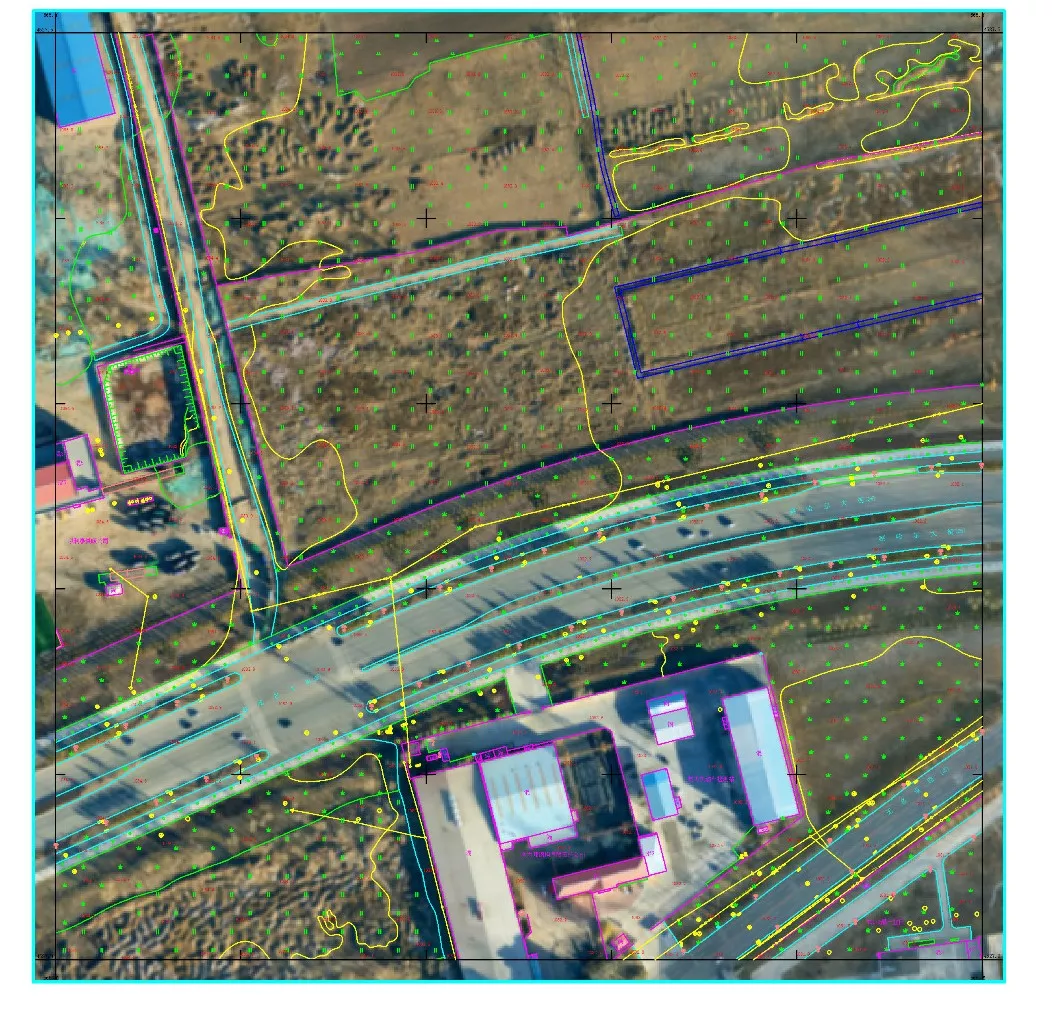
数字规划图
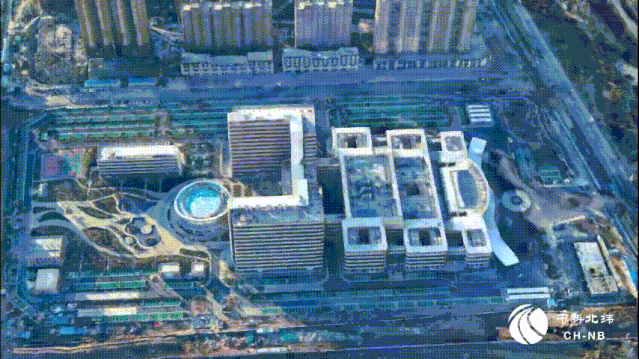

实景三维模型
文章来源:中科北纬(北京)科技有限公司
分享: