由冰柏科技自主研发的利用无人机搭载的嵌入式计算平台,通过融合视觉SLAM算法及摄影测量技术,实现在飞行过程中对采集影像数据的机上实时成图与精确定位。利用通导控一体化单元大幅提升集群无人机在大面积、动态环境中的实时三维数据采集与分析效率,应用于大规模环境监测、农业植保、应急搜救等场景。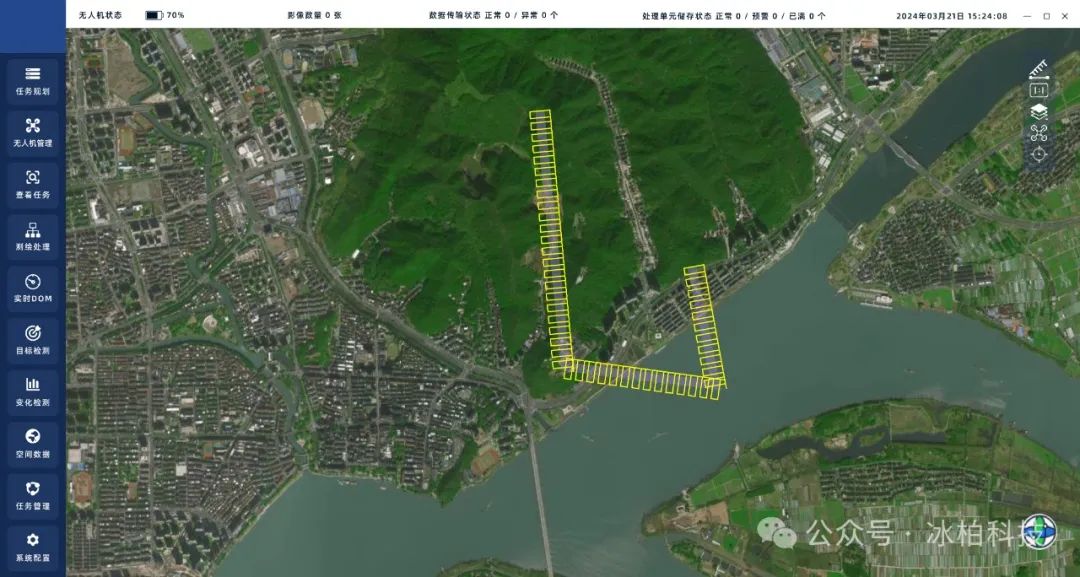
通过协议层的多样化通信协议,结合通信层的稳定数据传输,以及数据层的全面信息管理,DroneSwarm确保了无人机任务的精确规划与执行。通过精确的平面分区规划,无人机群能够执行细致的测绘任务,每架无人机都被赋予特定的目标和航线,以确保覆盖广泛区域的同时,保持数据采集的高精度。
实现远距离、大面积地区的完全自主化影像数据采集,实现了异构无人机的综合调度规划,精确估算所需无人机的数量,高效分割任务区域,优化轨迹规划,并对作业时间进行精确预估。

支持局部三维立体协同测绘,依据建筑几何特征,精准规划立体覆盖轨迹。实现近距离、高分辨率的自主影像采集。
对无人机实时采集的影像、定位定姿数据,如GPS和IMU惯导数据等,采用基于视觉SLAM和摄影测量方法,实现对关键帧的位姿解算。实时恢复场景空间结构,确保地图绘制的准确性。
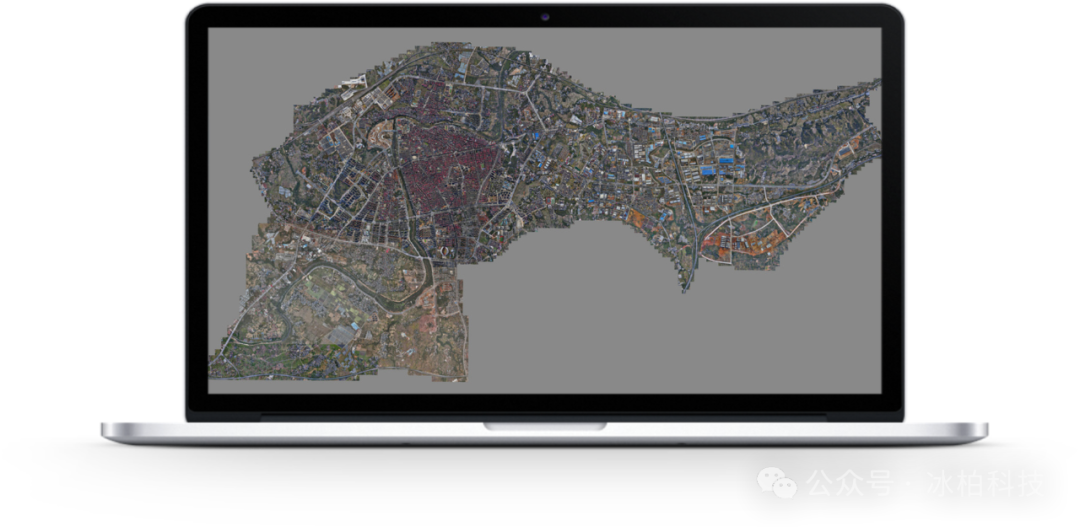
实时拼接
利用多个无人机实时回传的影像和定位数据,实现正射影像的实时拼接。超高精度
通过对所有影像位姿进行整体光束法平差优化,实现高精度地图绘制。快速输出
20平方公里作业面积,可实现在摄影任务完成 15分钟内,完成全区 DOM 的纠正和拼接,满足 1:2000 比例尺的高精度测绘标准。Target recognition and tracking使用并行计算架构,能够在短时间内处理和分析图像特征数据,快速准确识别多种类目标。针对不同的环境和条件自动调整识别参数,具有较强的环境适应性。结合自研目标识别算法,准确识别并提取多种静止或活动目标物,如人员、车辆、载具、桥梁等。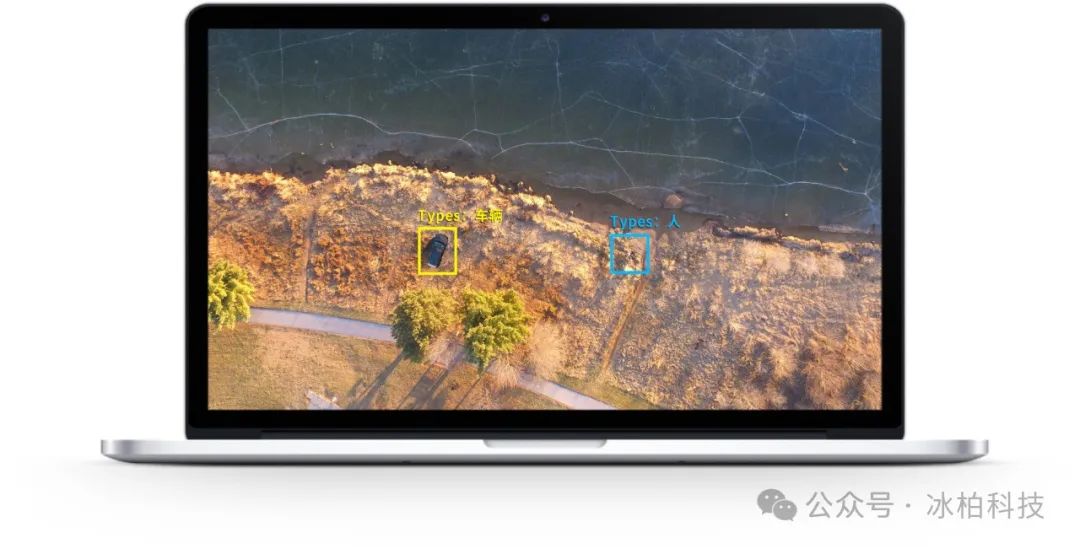
利用机上SLAM技术捕获连接点和相机位姿,实现地面端的快速空三加密和位姿优化。采用多CPU/GPU并行计算框架,加速点云提取、模型构建和纹理映射过程。机上SLAM失效时,可使用原始影像数据进行离线三维重建,确保作业连续性。
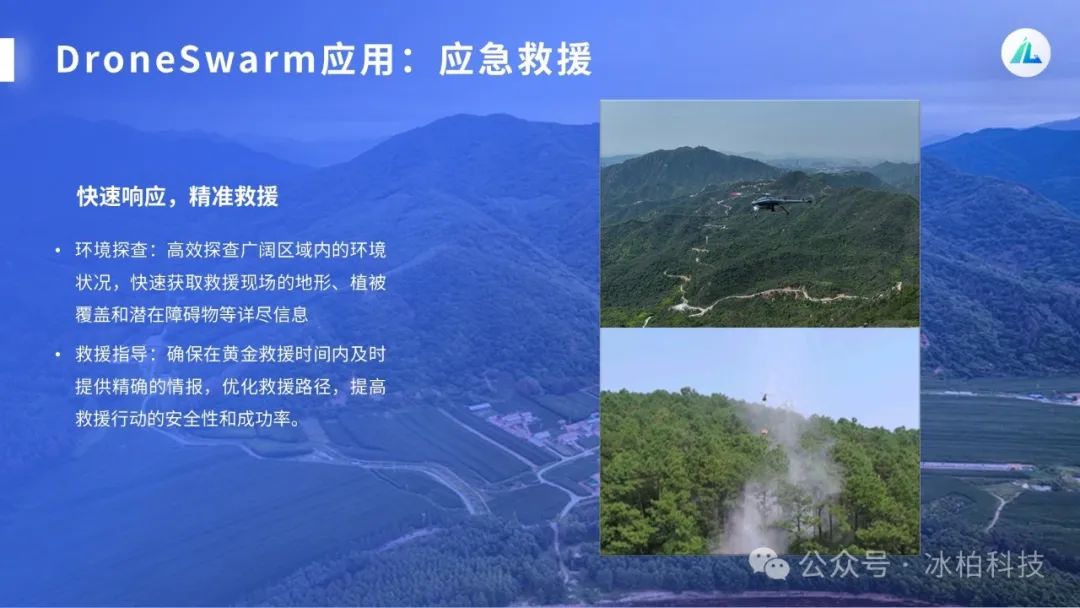
评估农业资产,工作周期由传统的一个月缩短至仅需一个星期,利用先进算法确保清点准确率超过98%。高效探查广阔区域内的环境状况,快速获取救援现场的地形、植被覆盖和潜在障碍物等详尽信息。实时生成二维高清地图和三维模型,大幅提高检查效率,精确识别损坏和潜在问题。预防性维修,降低维护成本,提高基础设施的运行安全性。为城市规划师提供一站式数据服务,从飞行监测、数据采集,再到重建与分析。利用生成的地图和模型数据,规划者可以迅速作出决策,优化城市设计。为地质学、生态学等科学研究领域提供了强大的智能化分析工具,使研究人员能够根据研究需求快速定制个性化数据模型。通过高精度的空中观测和快速的数据处理能力,系统能够支持复杂环境的数据采集与分析。
点击图片回顾往期热文